AirBurr
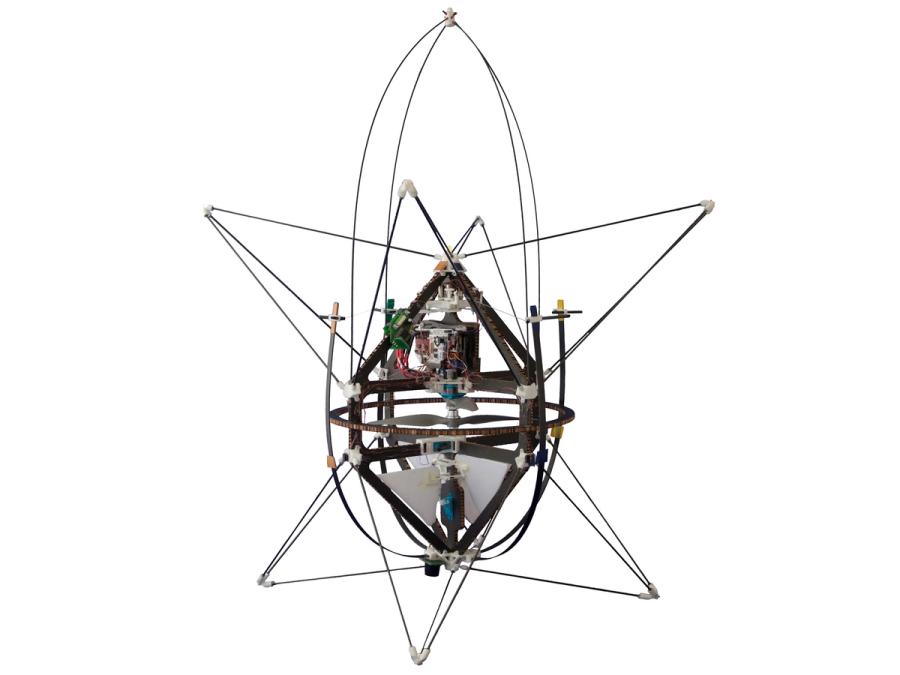
AirBurr is a flying robot designed for constrained, cluttered spaces. Its spring-based cage protects it from damage. Even after crashing on walls and other things, it just picks itself up and takes off.
- Creator
- Year
- 2010
- Country
- Switzerland 🇨🇭
- Categories
- Features
Did you know?
Researchers have created about a dozen AirBurr versions, which have names like V1-Hovermouse, V4-Crashy, and V6-Sticky.


History
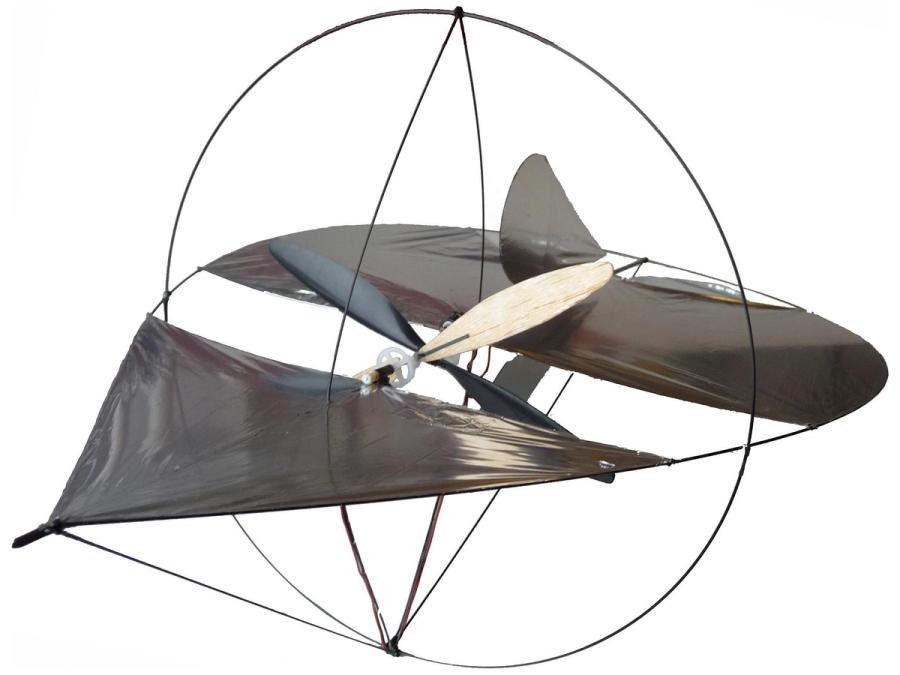
The AirBurr project was born when researchers at the Laboratory of Intelligent Systems at the Ecole Polytechnique Federale de Lausanne (EPFL) began observing how animals fly. Birds and insects often collide with windows and other obstacles, but they are built to survive and recover from such crashes, unlike most existing flying robots. The first AirBurr was a 25-gram wing-based platform, and it has since gone through more than 10 major revisions. In its evolution, AirBurr has been able to crash, stand up, stick to walls, follow light sources, and, perhaps most important, generally entertain its makers. The final goal is building a version capable of navigating even more complex and constrained environments, such as caves or collapsed buildings.
Specs
- Overview
Equipped with retractable arms for self-righting after crashes. Able to navigate by bumping into the environment or following a light source.
- Status
Ongoing
- Year
2010
- Website
- Width
- 35 cm
- Height
- 70 cm
- Length
- 35 cm
- Weight
- 0.35 kg
- Sensors
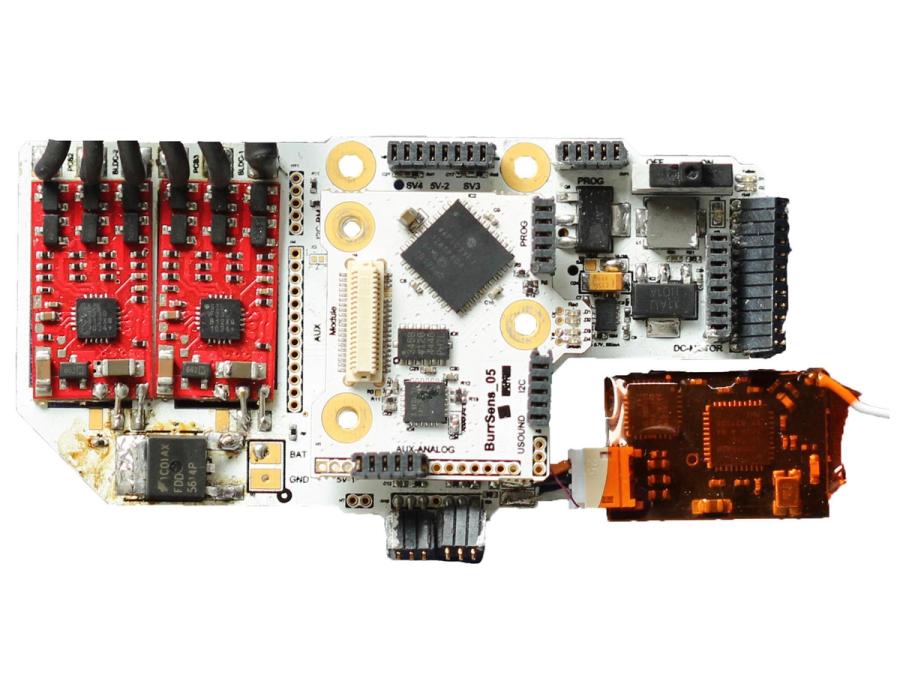
Standard: three-axis accelerometer and gyroscope (for inertial stabilization), ultrasonic sensor (altitude detection), four photodiodes (to detect leg position and external light sources). Optional: three-axis high-g accelerometer (collision force detection), miniature optic flow sensors (anti-drift), Hall-effect-based contact sensor embedded within protective cage.
- Actuators
Coaxial dual brushless DC motor (thrust), two servos (control surfaces), and four brushed DC motors with custom gearbox (legs).
- Materials
Carbon fiber and aramid inner frame; carbon fiber rods and laser-sintered plastic for protective structure.
- Compute
Two 16-bit microcontrollers. Custom wireless communication for telemetry and data logging.
- Software
Custom software written in C for embedded microcontrollers.
- Power
1350-mAh lithium-polymer battery, 10 minutes of flight.







