Momaro

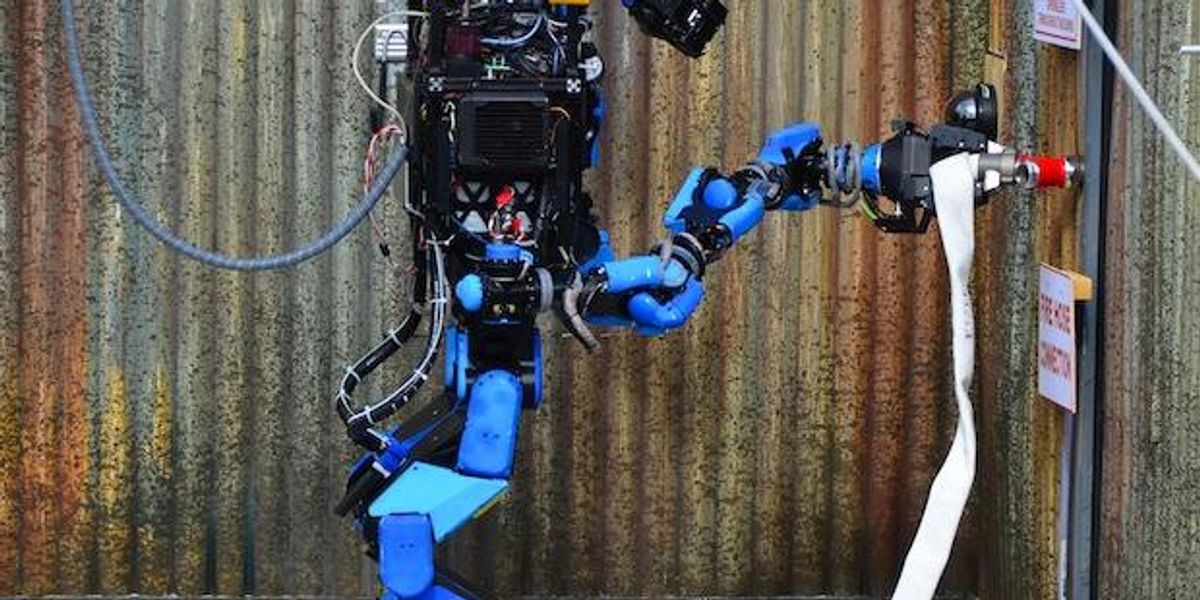
Momaro is a mobile robot that can carry out sensing and manipulation tasks in disaster sites and other harsh environments. It was designed to compete in the DARPA Robotics Challenge, coming in fourth place.
- Creator
- Year
- 2015
- Country
- Germany 🇩🇪
- Categories
- Features
Did you know?
Momaro stands for MObile MAnipulation Robot.

More Images


Specs
- Overview
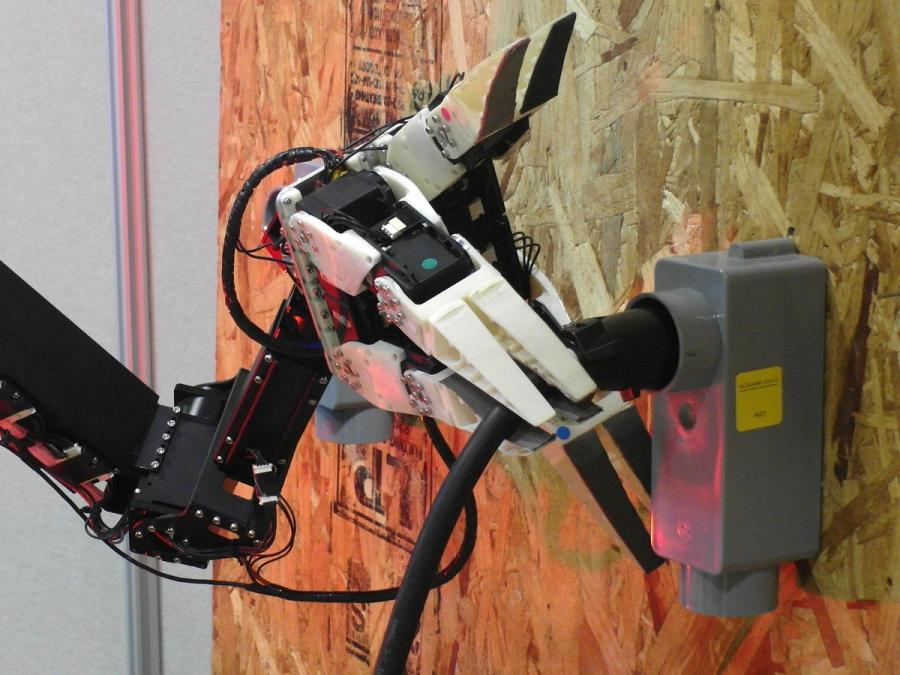
Advanced teleoperation capabilities. Omnidirectional driving. Hybrid driving-stepping locomotion. Dexterous Manipulation. Low-cost design using off-the-shelf components and 3D-printed parts.
- Status
Ongoing
- Year
2015
- Website
- Width
- 70 cm
- Height
- 100 cm (200 cm with legs extended)
- Length
- 80 cm
- Weight
- 58 kg
- Speed
- 4 km/h
- Sensors
Head with rotating 3D laser scanner. Pixhawk inertial measurement unit (IMU). Three full HD RGB cameras. Wide-angle camera at the upper body, front. Wide angle camera under the robot base (to get a view on the legs). RGB camera inside of both hands to support grasping. Microphone and infrared distance sensor.
- Actuators
Robotis Dynamixel actuators: H54-200 x 12; H54-100 x 8; H42-20 x 17; L42-10 x 2; MX-106 x 8; MX-64 x 9.
- Degrees of Freedom (DoF)
- 56 (Arm: 7 DoF x 2; Hand: 8 DoF x 2; Torso: 1 DoF; Leg: 4 DoF x 4; Wheel: 2 DoF x 4; Laser scanner: 1 DoF)
- Materials
Carbon fiber, aluminum frames, 3D-printed parts
- Compute
Main computer with 4.4 GHz Intel Core i7, 32 GB RAM. Six Crumb2560 microcontroller boards.
- Software
Ubuntu Linux OS, Robot Operating System (ROS)
- Power
22.2-V 1.6-Ah lithium-polymer battery, 1.5 hours of operation
- Cost
- €50,000