RoboBee

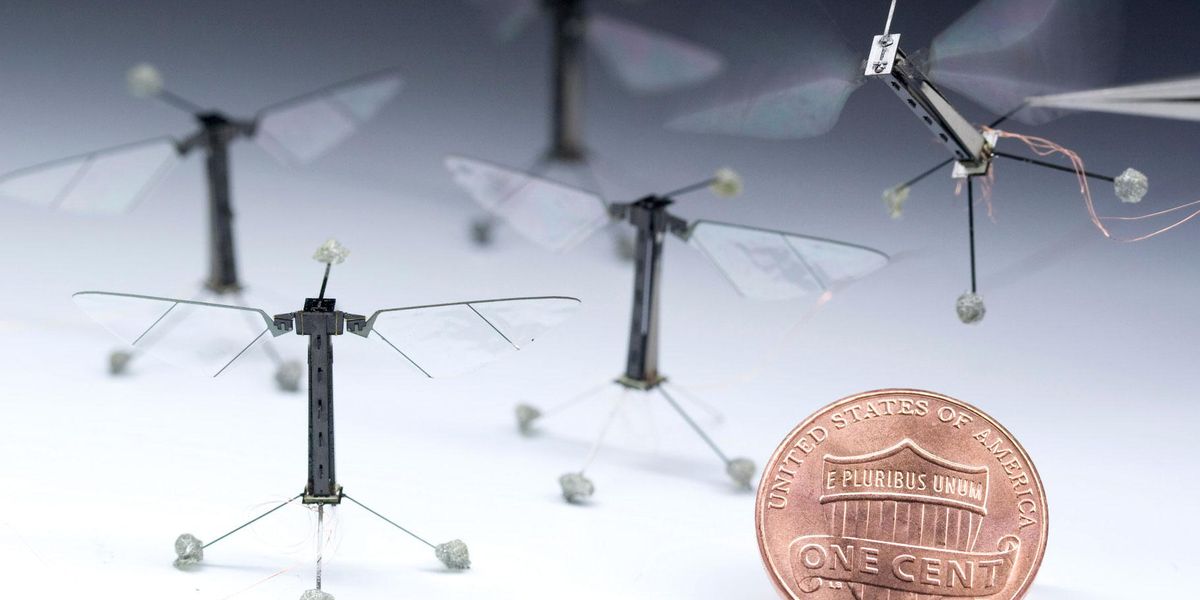
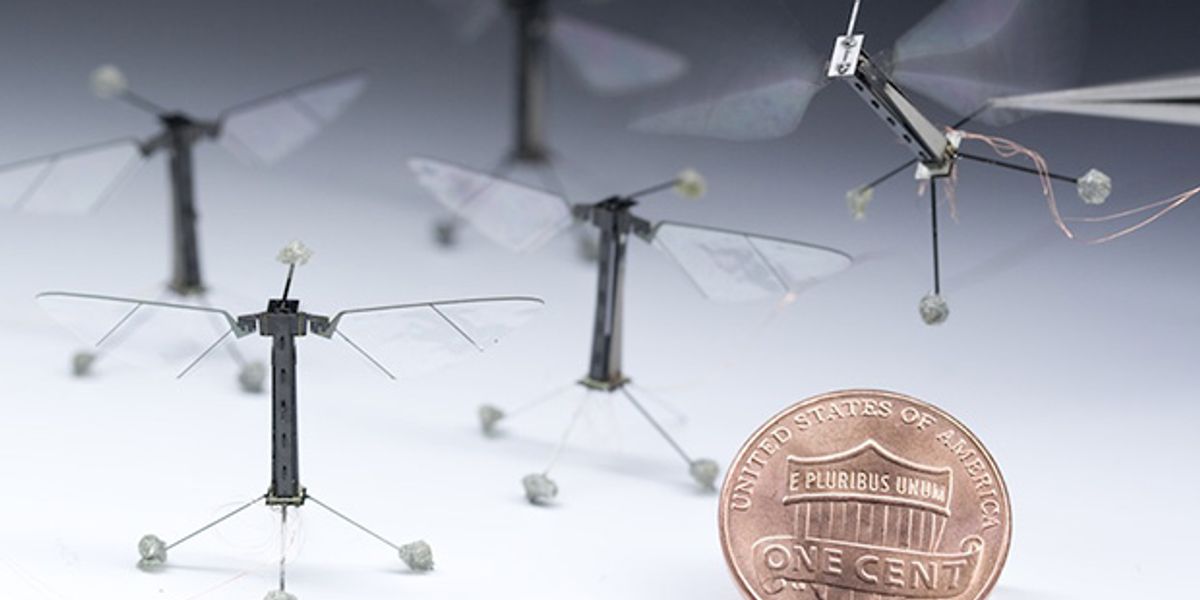
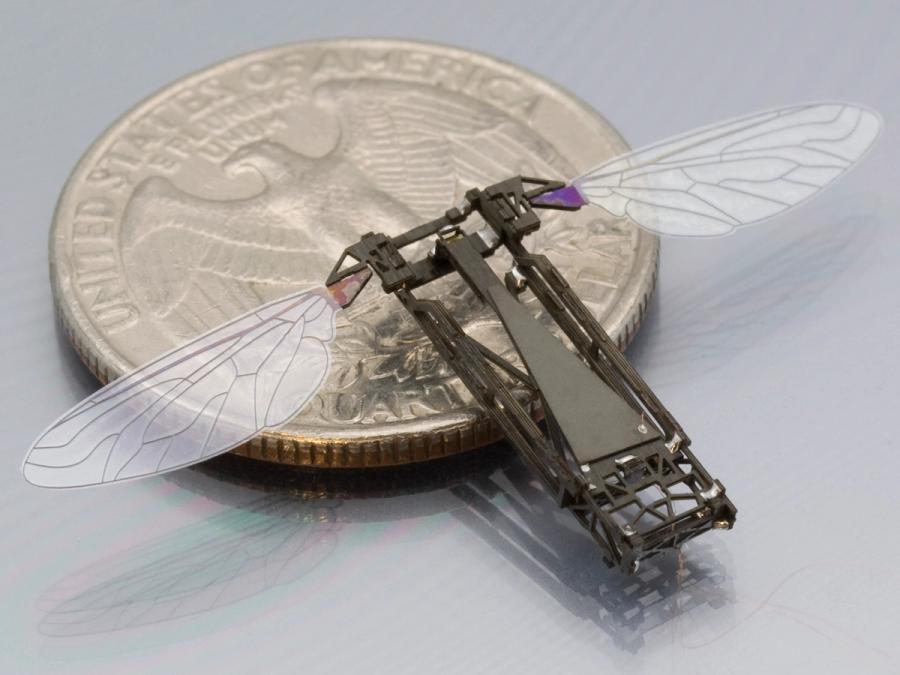
RoboBee is a small flapping-wing robot modeled on one of the busiest and most useful insects of all time: the bee. The goal is to create a colony of robotic bees that mimic the behavior of real bees.
- Creator
- Year
- 2009
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
One type of RoboBee is completely printable, assembling itself out of a sequence of flat layers like a pop-up book.
History
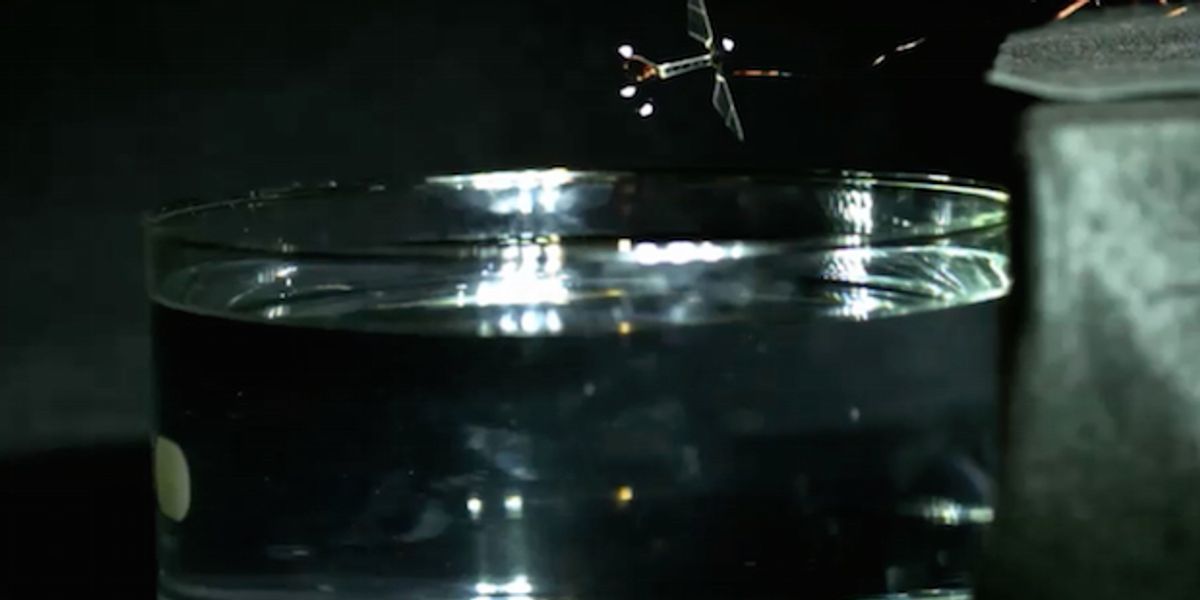
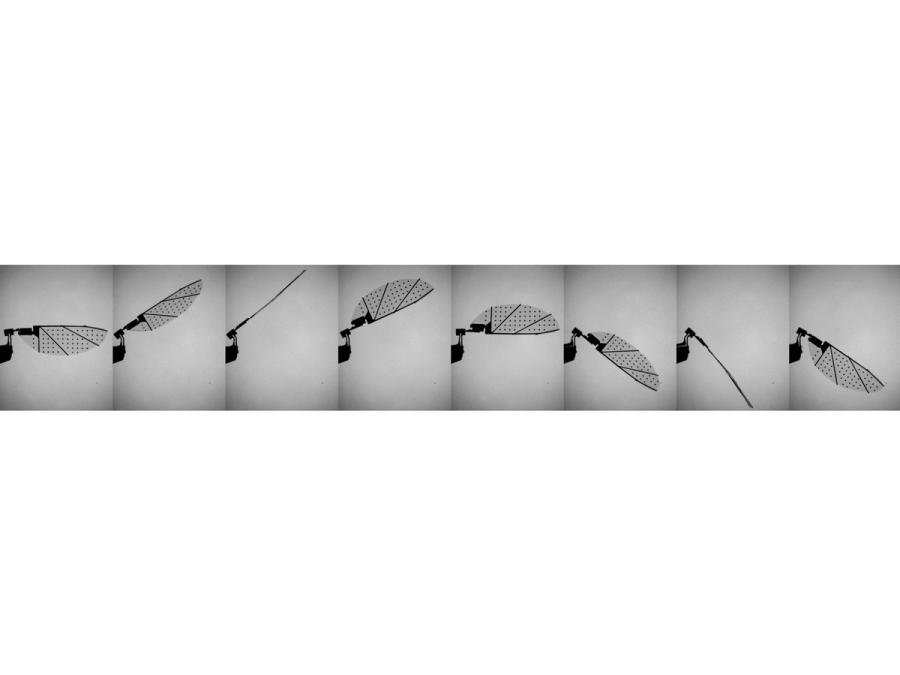
RoboBee was developed by a team of researchers led by Prof. Robert J. Wood at the Harvard Microrobotics Laboratory. The project began in the laboratory of Wood's then-advisor, Ronald S. Fearing, a professor of electrical engineering at the University of California, Berkeley, and later migrated to Harvard. The insectlike robots Woods and his colleagues are creating are intended to perform search and reconnaissance operations, especially where humans can't go. For inspiration, the researchers focused on the two-winged insects of the order Diptera, which includes houseflies, hoverflies, and fruit flies. Over the years, as the robot's hardware and control improved, the Harvard team demonstrated RoboBee steering in midair, landing and swimming in water, hovering and pivoting, and flying untethered while powered by lasers and solar cells.

Specs
- Overview
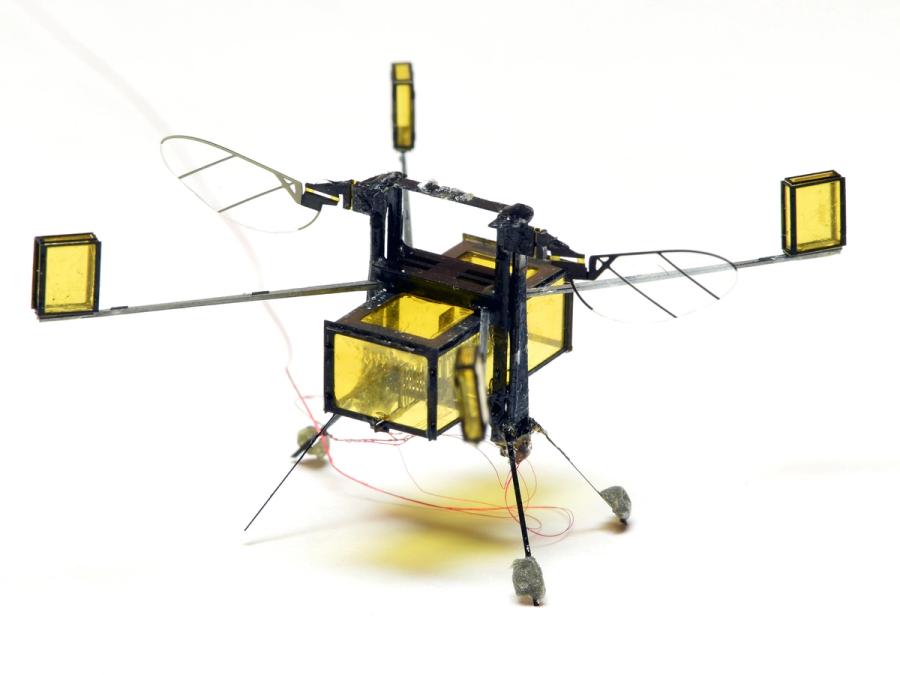
Modular, easy-to-fabricate design. Equipped with bio-inspired actuators, sensors, and flying control mechanisms.
- Status
Ongoing
- Year
2009
- Website
- Width
- 3 cm
- Weight
- 0.00005 kg to 0.0002 kg | 0.0004 lb (depending on version)
- Speed
- 3.6 km/h
- Sensors
Gyroscopes, optical flow sensors, ocelli sensor (insect-inspired horizon detection sensors).
- Actuators
Piezoelectric bending bimorph cantilevers
- Degrees of Freedom (DoF)
- 3 to 5 (depending on model)
- Materials
Combination of various materials, including composites, ceramics, polymers, and metals. "Pop-up book MEMS" fabrication method.
- Software
Custom software
- Power
Tethered