Stanley

Stanley is an autonomous Volkswagen Touareg that won the 2005 DARPA Grand Challenge. It completed the 212-kilometer (132-mile) desert course in the shortest time and claimed the $2 million prize.
- Creator
- Year
- 2005
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
More than 100,000 lines of code were used to give Stanley autonomous capabilities.

Specs
- Overview
Equipped with AI software that integrates sensor data and uses machine learning and probabilistic reasoning to make driving decisions.
- Status
Discontinued
- Year
2005
- Website
- Width
- 192.8 cm
- Length
- 475.4 cm
- Weight
- 2400 kg (car only)
- Speed
- 61.2 km/h (top speed during race)
- Sensors
Camera, two radars, GPS, six-axis inertial measurement unit, five Sick laser range finders.
- Actuators
One DC motor attached to the steering column and one linear actuator attached to the gear shift (to change between drive, reverse, and parking). Custom interface for direct electronic actuation of throttle and brakes. Car engine: turbocharged five-cylinder in-line diesel.
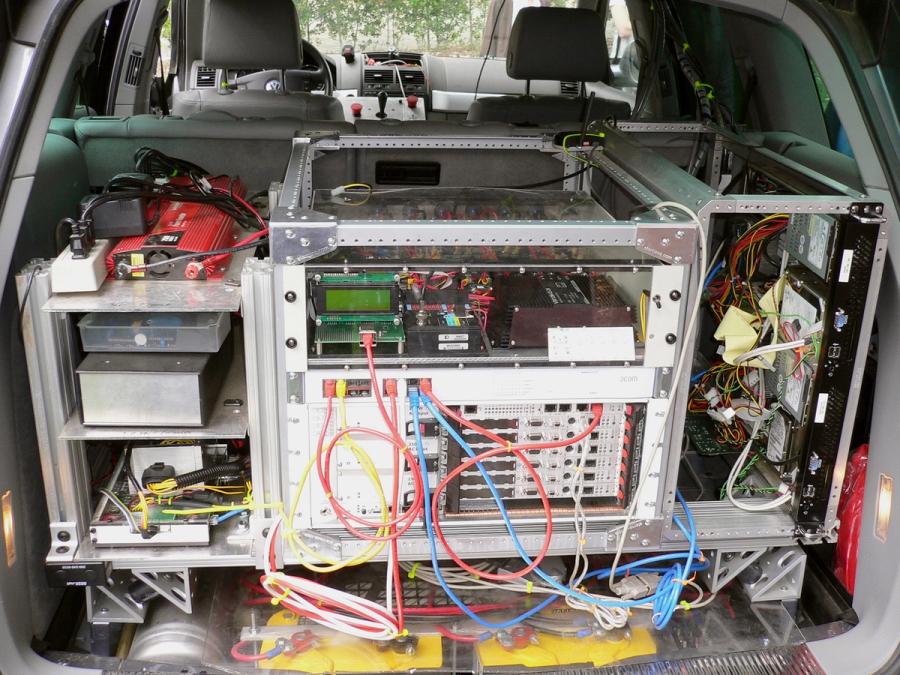
- Compute
Six Intel Pentium M computers, Gigabit Ethernet switch, and sensor interfaces.
- Software
Linux OS. Custom software.
- Power
Vehicle alternator and custom power system with backup batteries







