TurtleBot

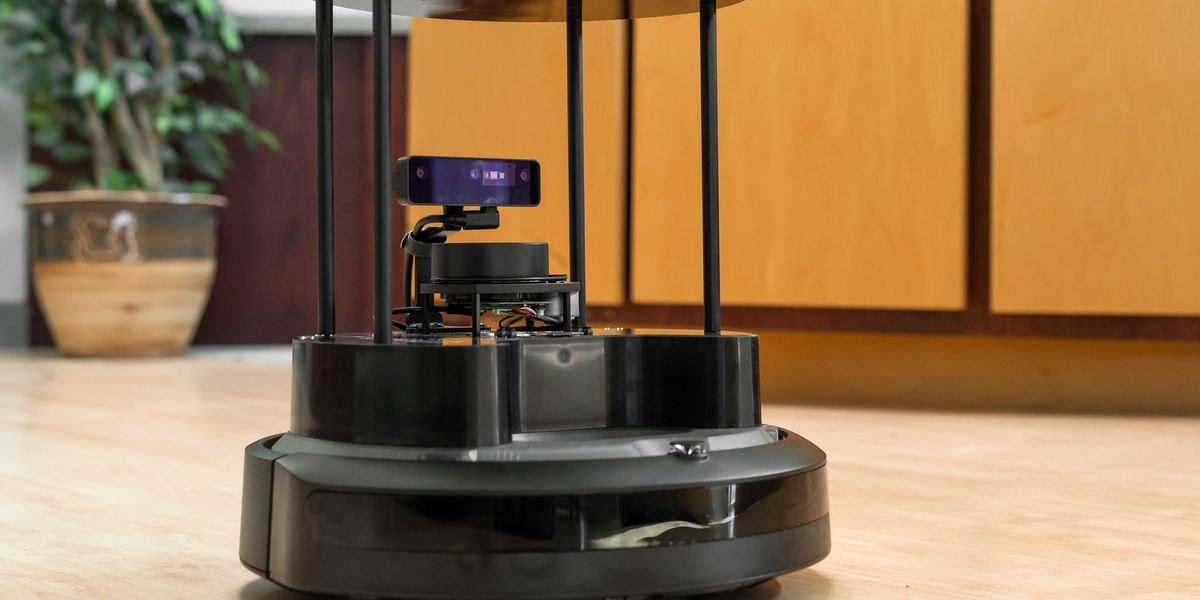
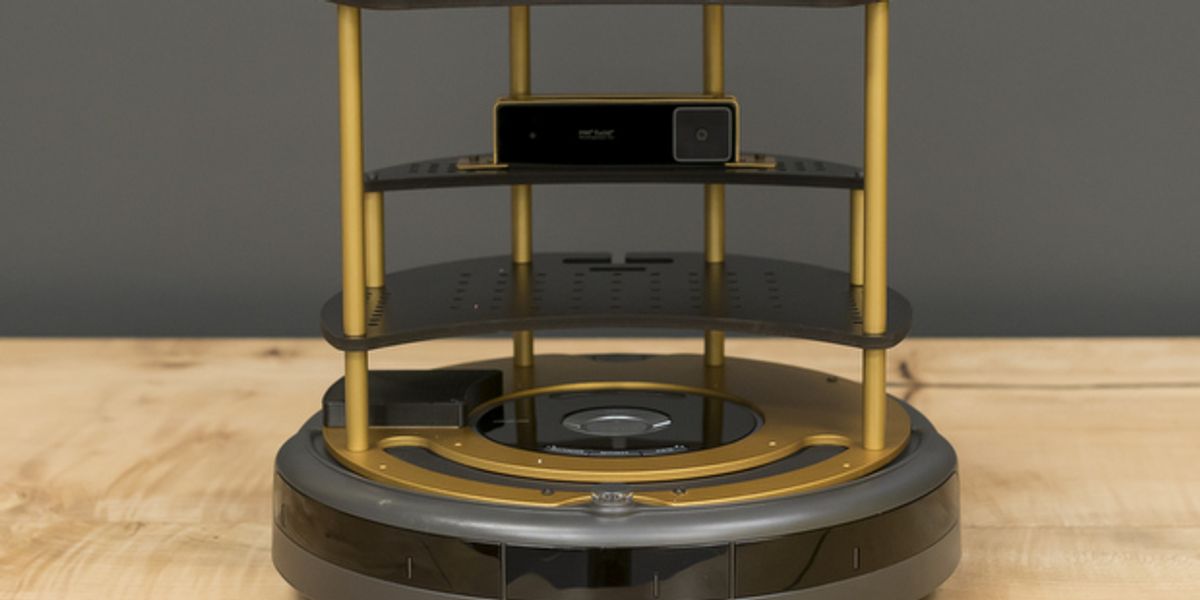
TurtleBot is a low-cost personal robot designed for hobbyists and researchers. It's open source, runs the ROS operating system, and combines a netbook with a Kinect 3D sensor and a mobile base.
- Creator
(Originally developed at Willow Garage. TurtleBot 1 and 2 discontinued. TurtleBot 3 and 4 available through multiple distributors.)
- Year
- 2011
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
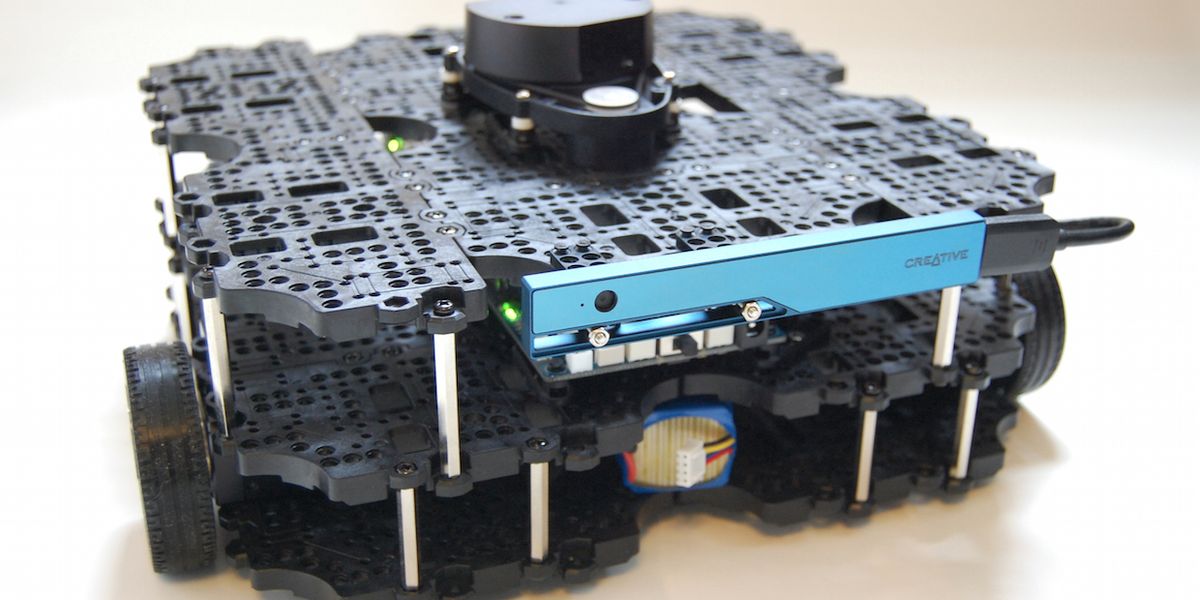
A variety of open-source add-ons for TurtleBots are available, including webcams, laser sensors, and even arms.

History
TurtleBot was developed by Melonee Wise and Tully Foote at Willow Garage in 2010. Their goal was to create an affordable and open source personal robot platform that was easy to assemble and used off-the-shelf parts. The initial version had a mobile base, 2D/3D sensor, laptop, and mounting hardware. It was capable of driving around autonomously, creating 3D maps, and detecting objects and people. It ran the Robot Operating System (ROS), also under development at Willow Garage. To program the robot, users could download the TurtleBot SDK. TurtleBot proved to be a powerful entry-level mobile robotics platform with similar capabilities to larger platforms, like the PR2, making ROS and open source robotics more accessible for educators, students, and hobbyists.
Specs
- Overview
Capable of building maps of its environment and navigating autonomously. Open platform with access to raw sensor data.
- Status
Ongoing
- Year
2011
- Website
- Width
- 33 cm
- Height
- 40.6 cm
- Length
- 33 cm
- Weight
- 6.3 kg
- Speed
- 1.8 km/h
- Sensors
Microsoft Kinect, gyro, and iRobot Create built-in cliff and bump sensors.
- Actuators
Two motors
- Degrees of Freedom (DoF)
- 2
- Materials
Aluminum and MDF (medium density fiberboard).
- Compute
Asus Eee PC 1215N
- Software
ROS (Robot Operating System)
- Power
14.4-V nickel-metal hydride battery and laptop internal battery, 2 to 3 hours of operation
- Cost
- $1,500 (fully-assembled unit; non-assembled kit sells for $1,400)