Aqua2
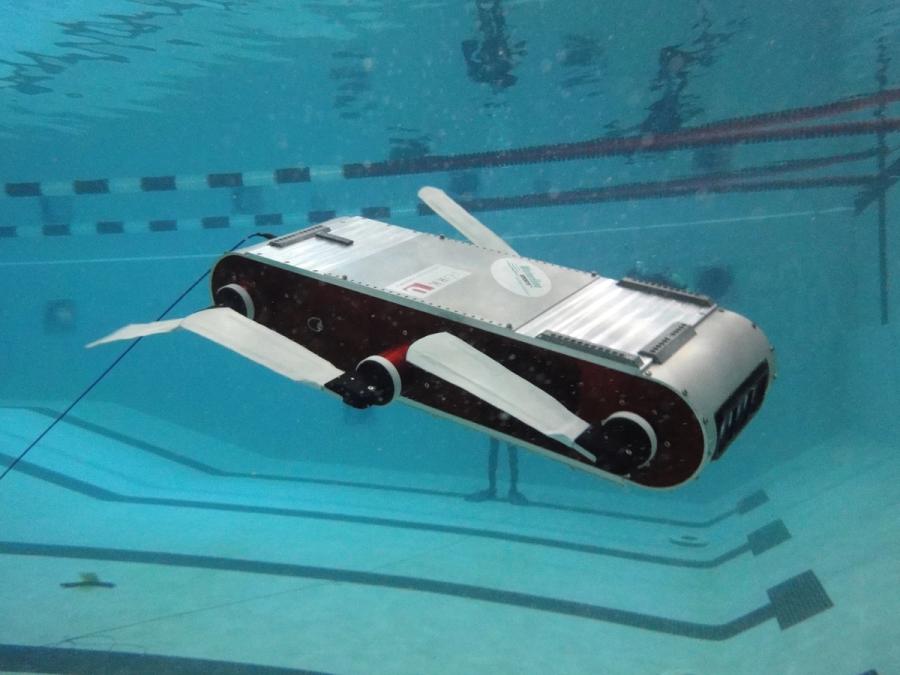
Aqua2 is an amphibious six-legged robot. It's designed for applications involving dive assistance, environmental monitoring, and locomotion research.
- Creators
McGill University, York University, and Independent Robotics
- Year
- 2010
- Country
- Canada 🇨🇦
- Categories
- Features
Did you know?
Aqua's flippers move independently, enabling it to move forward, backward, up, down, and sideways; it can also perform somersaults and rolls.

History
The initial Aqua robots were designed by Gregory Dudek at McGill University, in Montreal, in collaboration with teams led by Michael Jenkin at York University, in Toronto, and Evangelos Milios at Dalhousie University, in Halifax, Canada. Their first Aqua design, based on RHex, a six-legged walking robot developed by U.S. and Canadian researchers in a program sponsored by DARPA, was unveiled in 2004. Aqua has been tested in real underwater environments in Barbados and Nova Scotia, where scientists used the robot to assess the health of coral reefs and other marine life. A commercial version of Aqua is currently offered by Independent Robotics.


Specs
- Overview
Rugged sealed chassis, multiple walking gaits and swimming styles, water resistant up to 30 meters, 3D mapping.
- Status
Ongoing
- Year
2010
- Website
- Width
- 44 cm
- Height
- 13 cm
- Length
- 64 cm
- Weight
- 16.5 kg
- Speed
- 3.6 km/h (swimming)
- Sensors
Three cameras, inertial measurement unit, depth sensor.
- Actuators
Six independently controlled appendages (fins or legs)
- Degrees of Freedom (DoF)
- 6
- Materials
High grade aluminum chassis with six vinyl control fins or fiberglass legs.
- Compute
On-board control stack with 500 MHz processor. Vision stack with 1.4 GHz processor.
- Software
ROS compatible software modules and user interface
- Power
Batteries, 5 hours of operation
- Cost
- $60,000 to $110,000 (depending on configuration)