RHex
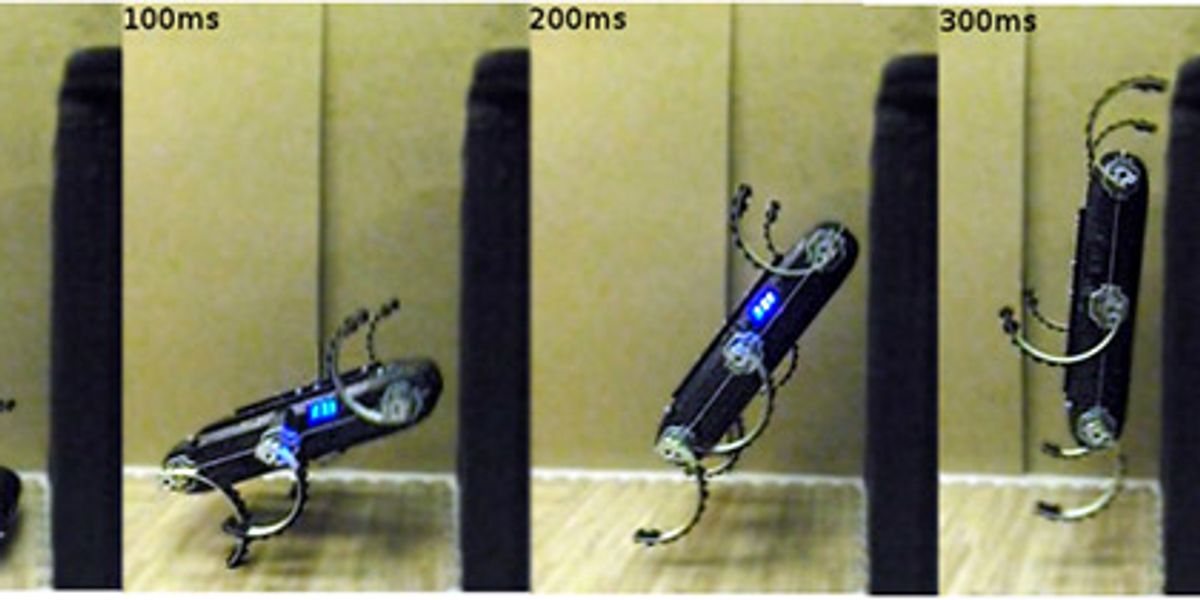
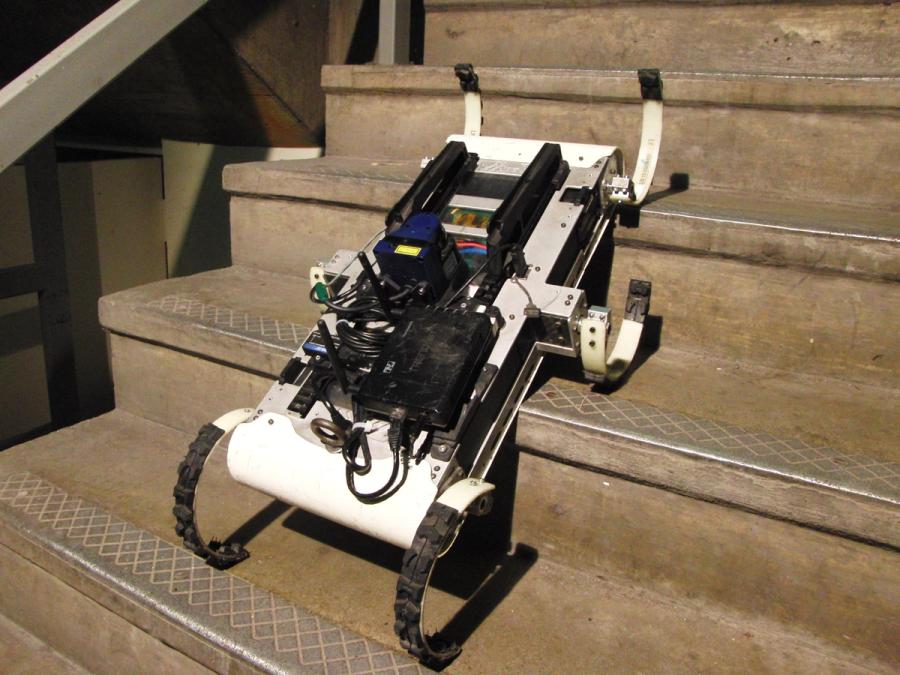
RHex is a bio-inspired, hexapedal robot designed for locomotion in rough terrain. It can drive over rocks, mud, sand, snow, and railroad tracks. You can throw any obstacle in front of it: RHex doesn't care.
- Creators
University of Michigan, McGill University, Kod*Lab, and DARPA
- Year
- 2001
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
Roboticist Martin Buehler got the inspiration for RHex's design when he saw a cockroach racing over a rough surface.
History
The original RHex hexapod was built between 1999 and 2001 by a DARPA-funded consortium that included McGill University and the University of Michigan. Researchers continue to use the robot as a research platform to study dynamic robot locomotion. Other members of the RHex family include Desert RHex, Rugged RHex, T-RHex, Mini-RHrex, Aqua, EduBot, among others, and a commercial version was available from Boston Dynamics. The latest version, developed at the University of Pennsylvania, is X-RHex, which features improved hardware and a modular payload system that makes it a "laboratory on legs." X-RHex supports a variety of sensor suites on a small, mobile robotic platform intended for broad, general use in research, defense, and search-and-rescue applications.


Specs
- Overview
Specs for commercial version manufactured by Boston Dynamics. Rugged, modular design. Dust- and waterproof. Equipped with modular payload bay for mission-specific packages.
- Status
Ongoing
- Year
2001
- Website
- Width
- 39 cm
- Height
- 20 cm
- Length
- 57 cm
- Weight
- 12.5 kg (RHex); 8.6 kg (X-RHex)
- Speed
- 9.72 km/h
- Sensors
Cameras, gyroscope, accelerometer, and other optional sensors. Position, current, and temperature sensors in the motors.
- Actuators
Six DC motors
- Degrees of Freedom (DoF)
- 6
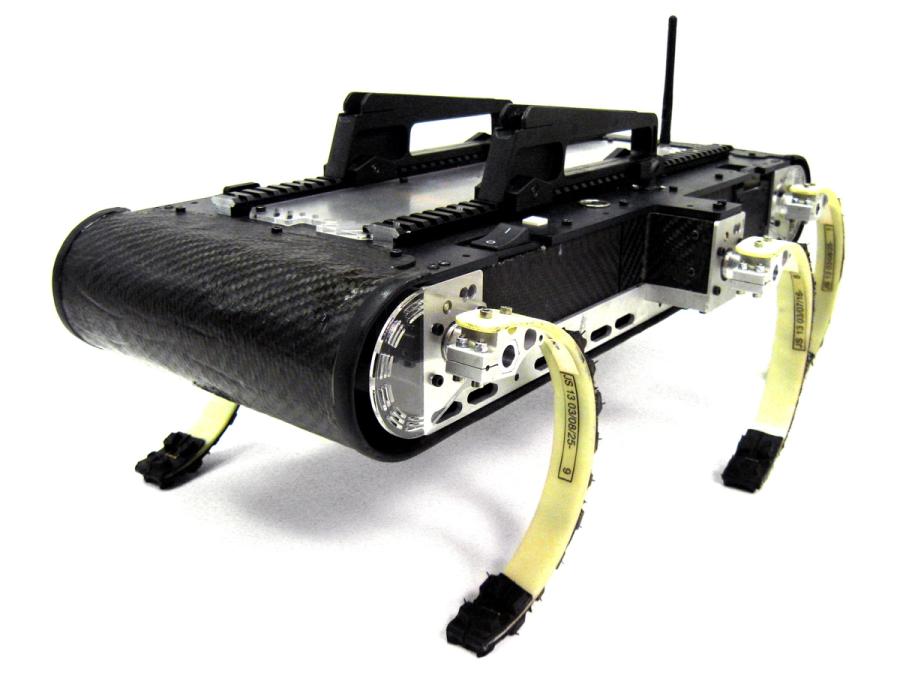
- Materials
Aluminum and carbon fiber body.
- Compute
Intel-based main computer; payload computer (optional).
- Software
Linux OS. Control software can be programmed in C, Python, or Matlab.
- Power
Two 144-Wh lithium-polymer batteries, 6 hours of operation