CHARLI

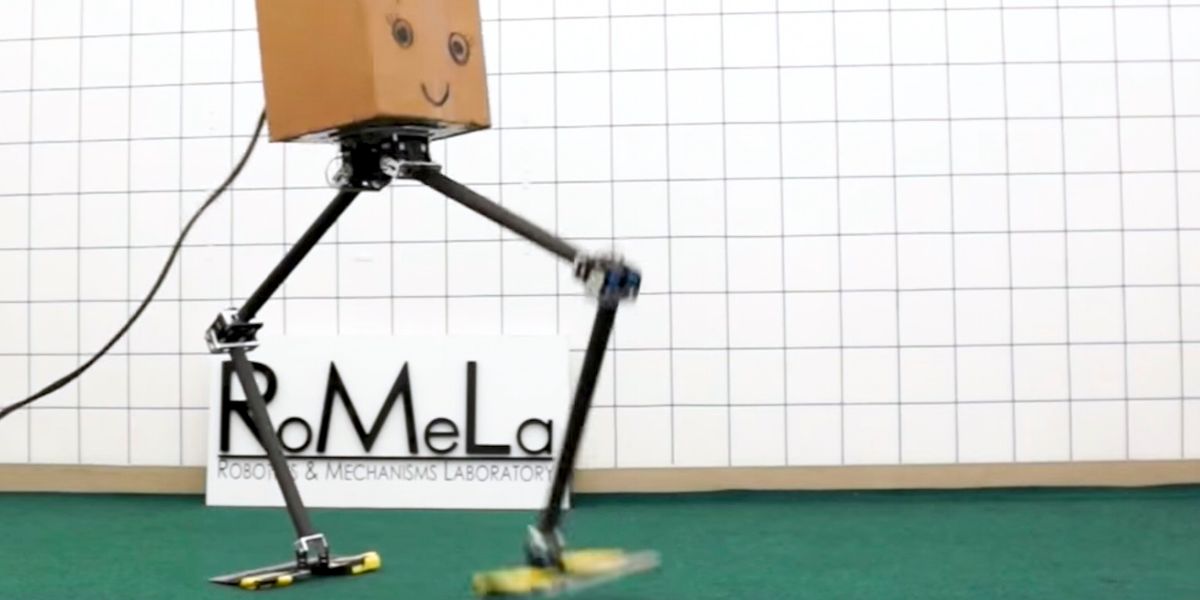
CHARLI is an adult-size humanoid designed as a platform to study robot mobility and autonomy. It can walk, kick a ball, and change its posture to avoid falls if something (or someone) pushes on it.
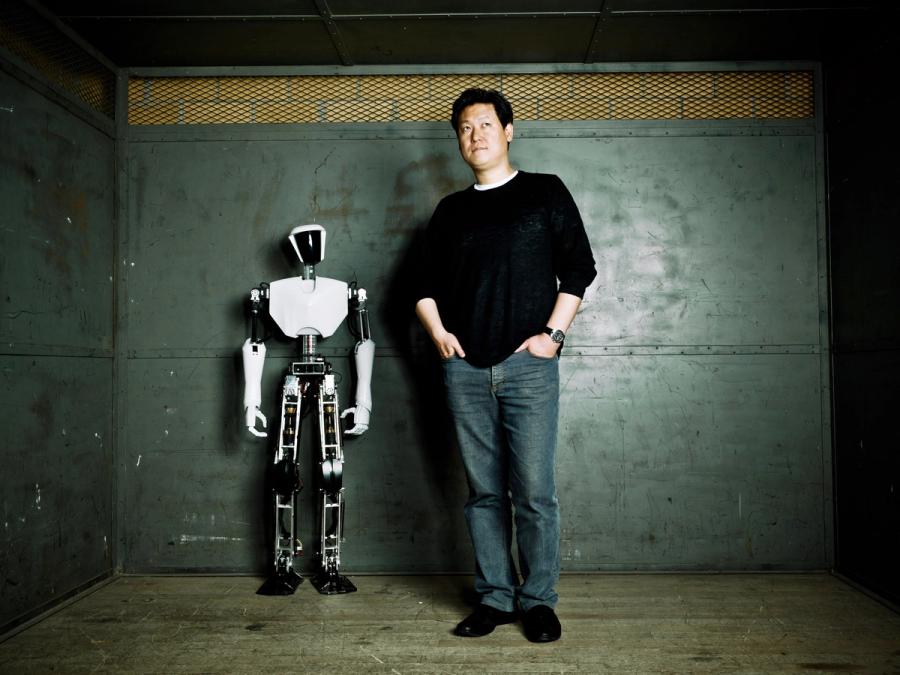
- Creators
- Year
- 2011
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
CHARLI was modeled on the NS-5 robots from the film "I, Robot" and the industrial robots that appear in Bjork's 1999 "All Is Full of Love" video.


More Images

Specs
- Overview
Modular, lightweight design. Capable of reacting to external disturbances using an active stabilization strategy.
- Status
Inactive
- Year
2011
- Website
romela.org/charli-cognitive-humanoid-autonomous-robot-with-learning-intelligence
- Width
- 20 cm
- Height
- 141 cm
- Length
- 48 cm
- Weight
- 12.1 kg
- Speed
- 1.4 km/h (walking)
- Sensors
Camera, three-axis rate gyro, three-axis accelerometer, two microphones, encoders in each joint.
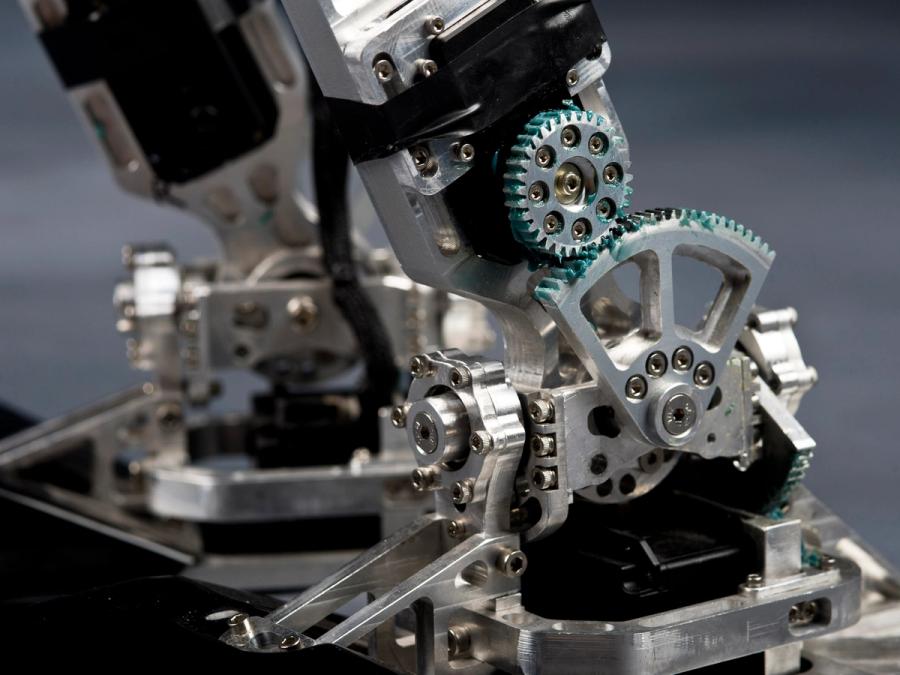
- Actuators
32 DC motors
- Degrees of Freedom (DoF)
- 25 (Leg: 6 DoF x 2, Arm: 4 DoF x 2, Head: 2 DoF, Hand: 1 DoF x 2, Torso: 1 DoF)
- Materials
Aluminum alloy, titanium, carbon-fiber composites, and plastics.
- Compute
Single-board computer with 1.6 GHz Intel Atom CPU.
- Software
Ubuntu Linux OS and custom operation and control program coded in C++ (LabVIEW version also implemented).
- Power
14.8-V lithium-polymer battery for actuation and 11.1-V lithium-polymer battery for computing, 30 minutes of operation