Darwin-OP
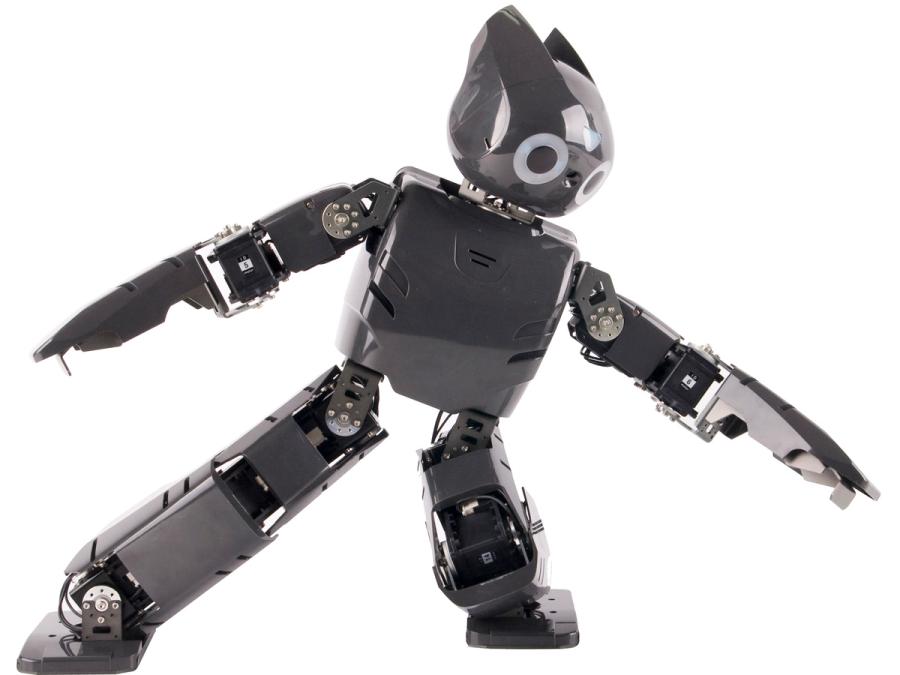
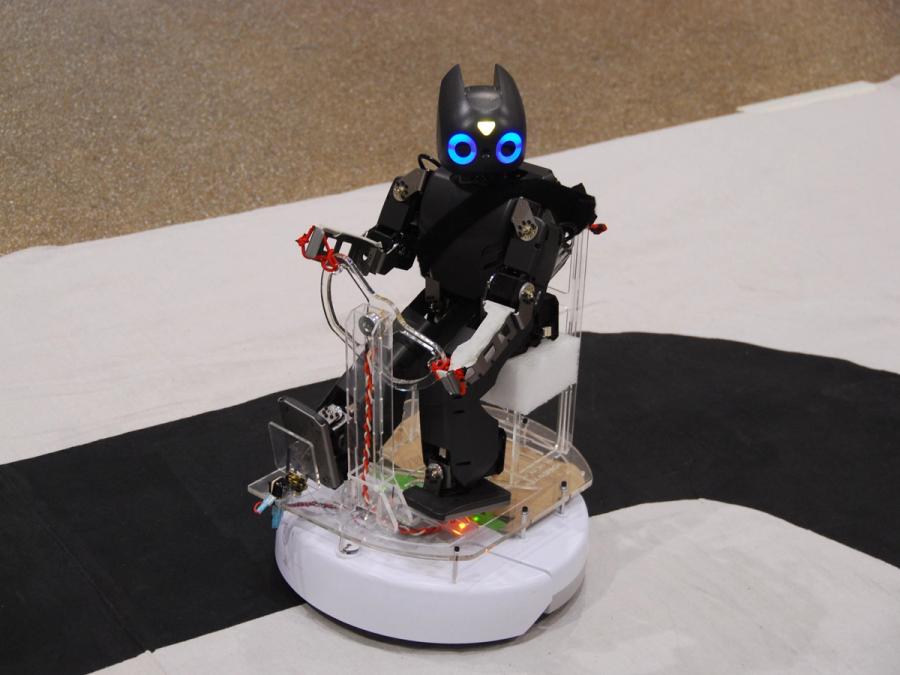
Darwin-OP is a small humanoid robot that can walk, dance, and speak. It can also play soccer, and if it falls, it just stands up and keeps going. It's designed as an open platform for robotics research.
- Creators
- Year
- 2010
- Country
- South Korea 🇰🇷
- Categories
- Features
Did you know?
Darwin-OP stands for "Dynamic Anthropomorphic Robot With Intelligence-Open Platform," an acronym crafted by acronym-loving roboticist Dennis Hong.


More Images
Specs
- Overview
Open hardware and software platform. Able to recognize and track objects. Equipped with modular, high-performance actuators.
- Status
Discontinued
- Year
2010
- Website
- Height
- 45.5 cm
- Weight
- 2.9 kg
- Speed
- 0.86 km/h
- Sensors
HD camera, three-axis gyroscope, three-axis accelerometer, stereo microphone. Force sensors optional.
- Actuators
Dynamixel MX-28T actuators (DC servos with contactless absolute encoders).
- Degrees of Freedom (DoF)
- 20 (Leg: 6 DoF x 2; Arm: 3 DoF x 2; Neck: 2 DoF)
- Compute
Intel Atom 1.6 GHz CPU (main computer), ARM Cortex M3 72 MHz CPU (subsystem), wireless network.
- Software
Ubuntu Linux OS, Darwin-OP software framework (open source, written in C++).
- Power
11.1-V 1000-mAh lithium-polymer battery, 30 minutes of operation. Or external power supply.
- Cost
- $12,000