HyQ
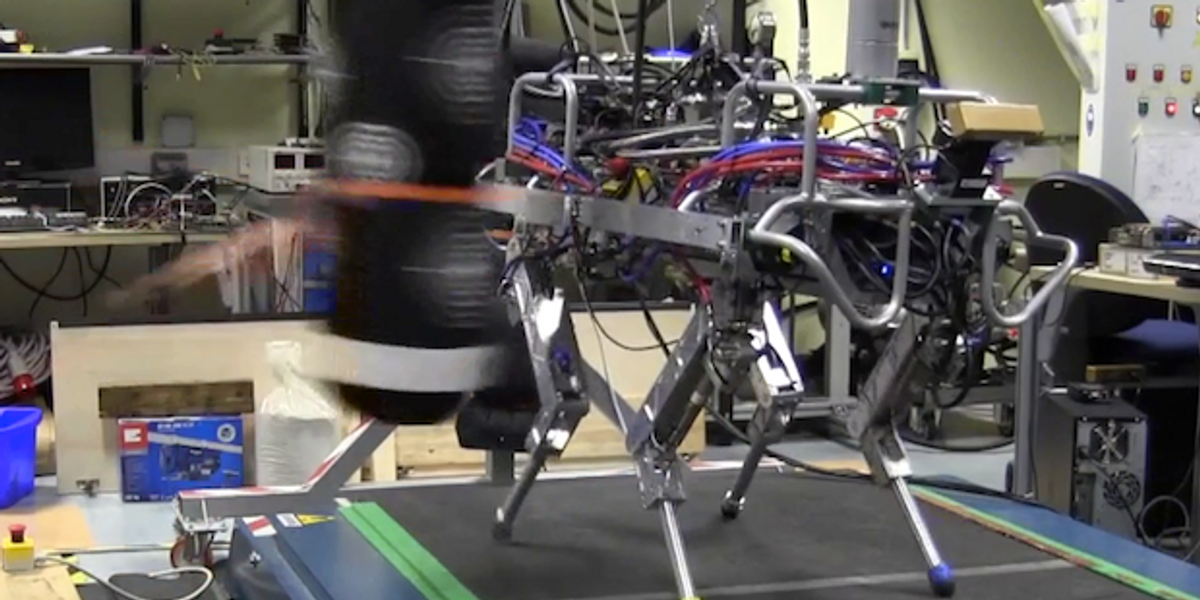
HyQ is a four-legged robot built as a platform to study quadrupedal locomotion. It can walk over obstacles, trot and rear like a horse, squat jump, and even kick things with its powerful hydraulic legs.
- Creator
- Year
- 2011
- Country
- Italy 🇮🇹
- Categories
- Features
Did you know?
HyQ stands for hydraulic quadruped.

History
HyQ is a quadruped robot designed for rough terrain missions. Created by a team at the Istituto Italiano di Tecnologia (IIT) led by Claudio Semini, HyQ can walk and trot, and also jump and even kick things. The robot uses hydraulic actuators, which allow it to move quickly and nimbly, with an eerie animal-like quality. Or as Semini explains, HyQ has a "wide repertoire of motion skills that allows it to negotiate challenging and dynamically changing terrain." In 2019, IIT announced a brand-new and massively upgraded quadruped called HyQReal. It's designed to be big, powerful, and rugged, and in a demonstration HyQReal was able to pull a 3-ton airplane.
Specs
- Overview
Equipped with torque-controlled legs with variable stiffness. Able to jump more than 20 cm (7.8 in) up in the air and land on its feet.
- Status
Inactive
- Year
2011
- Website
- Width
- 50 cm
- Height
- 100 cm (fully extended legs)
- Length
- 100 cm
- Weight
- 70 kg
- Speed
- 6.5 km/h
- Sensors
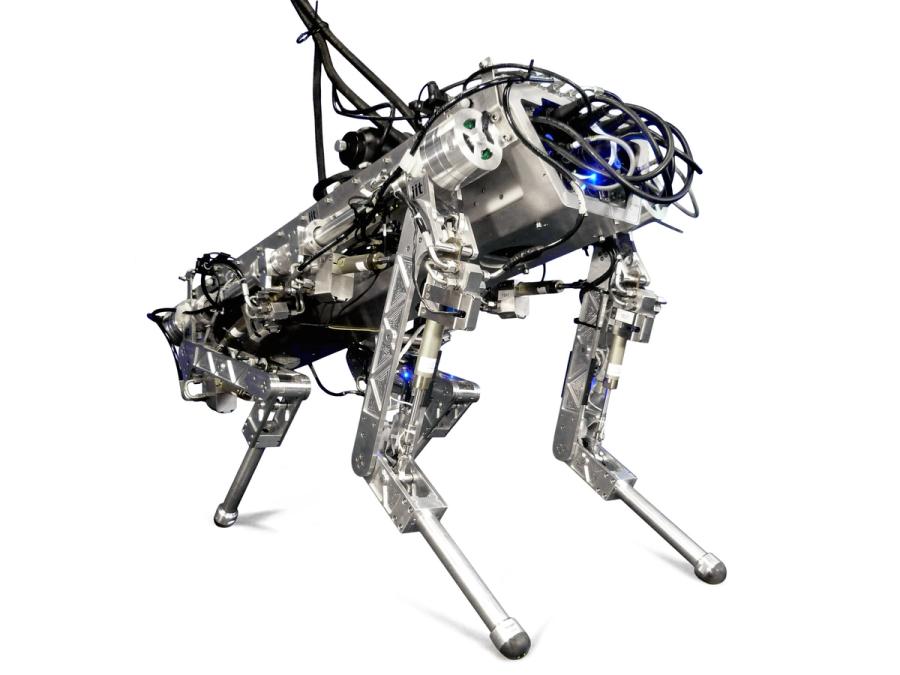
Stereo cameras, laser range finder, IMU, force-torque sensors and high-resolution encoders in each joint.
- Actuators
Eight hydraulic cylinders controlled by high-performance servovalves. Four brushless DC motors with harmonic drive gears.
- Degrees of Freedom (DoF)
- 12 (Leg: 3 DoF x 4)
- Materials
Torso and legs made of aerospace-grade aluminum alloy and stainless steel.
- Compute
PC/104 embedded computer with data acquisition boards.
- Software
Xenomai Linux real-time OS with SL simulation and control software package.
- Power
Tethered
- Cost
- $1.2 million (development cost)