Kismet
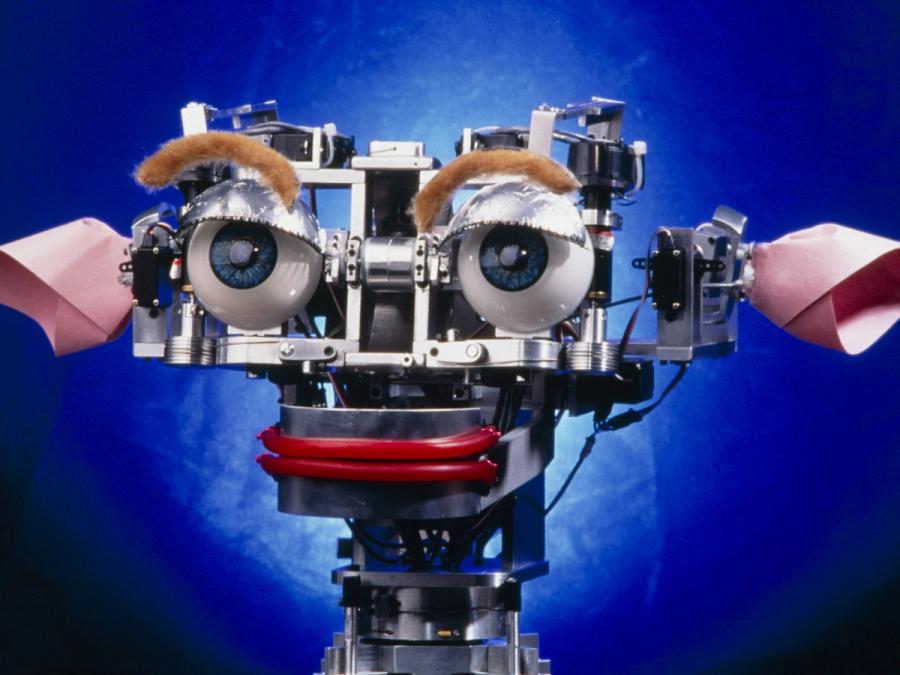
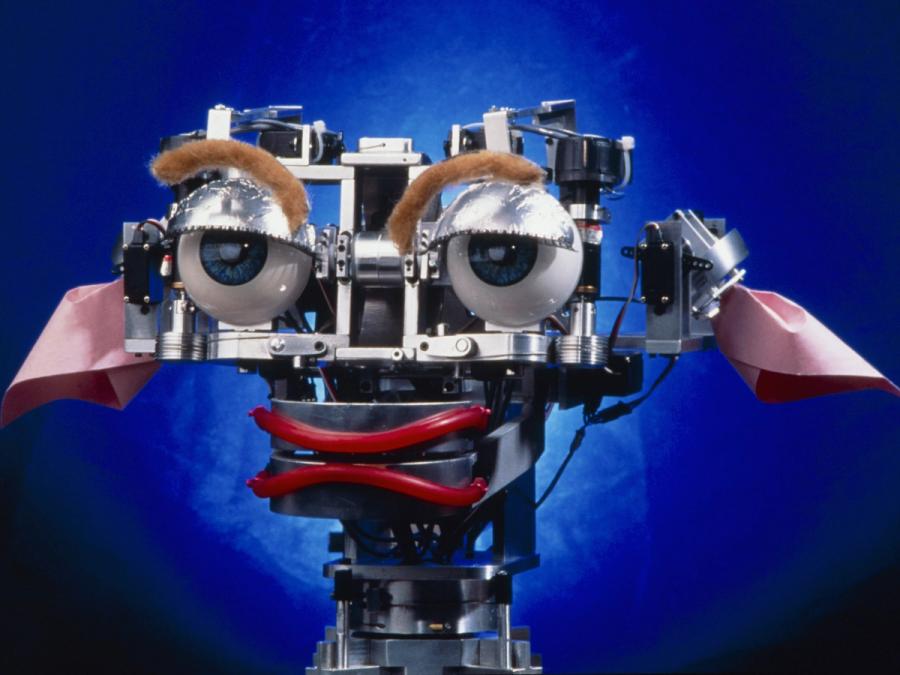
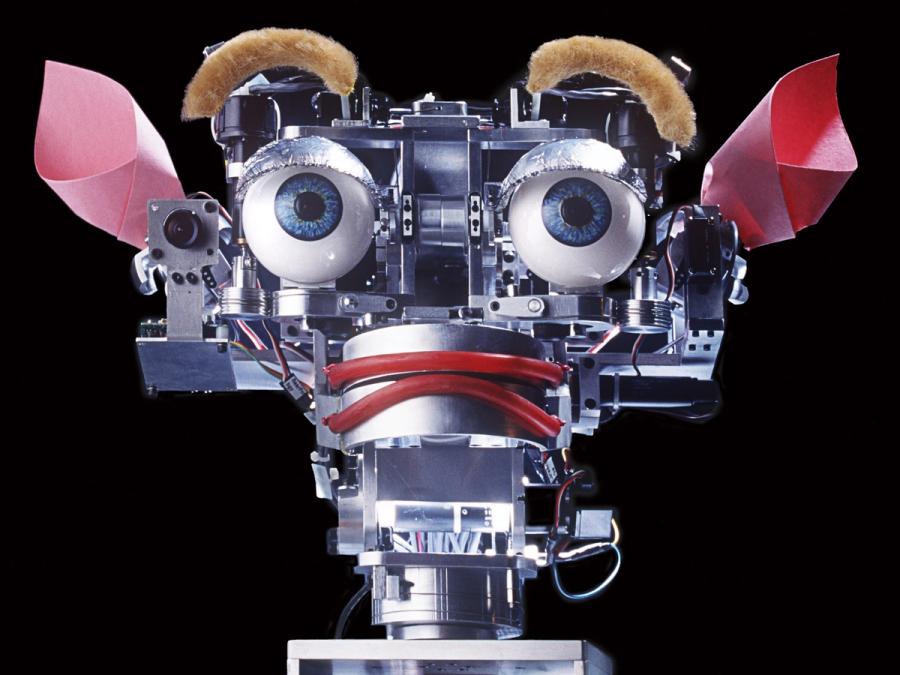
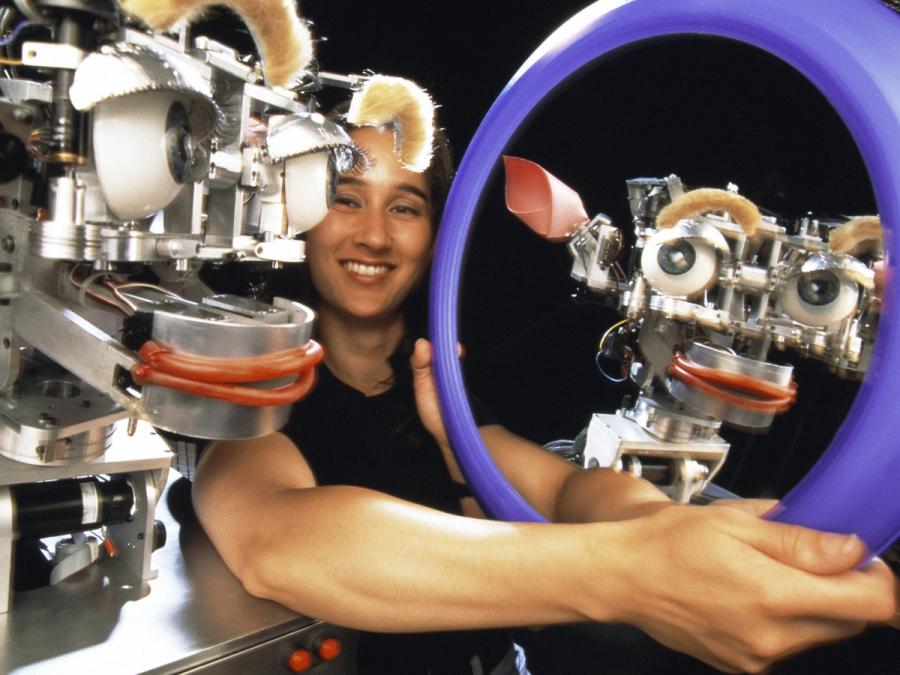
Kismet was one of the first robots able to demonstrate social and emotional interactions with humans. It had a cartoonish face, spoke with a squeaky baby voice, and could always make people smile.
- Creator
- Year
- 1998
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
Kismet, like you, has personal space, and it gets uncomfortable when people get too close to it.
History
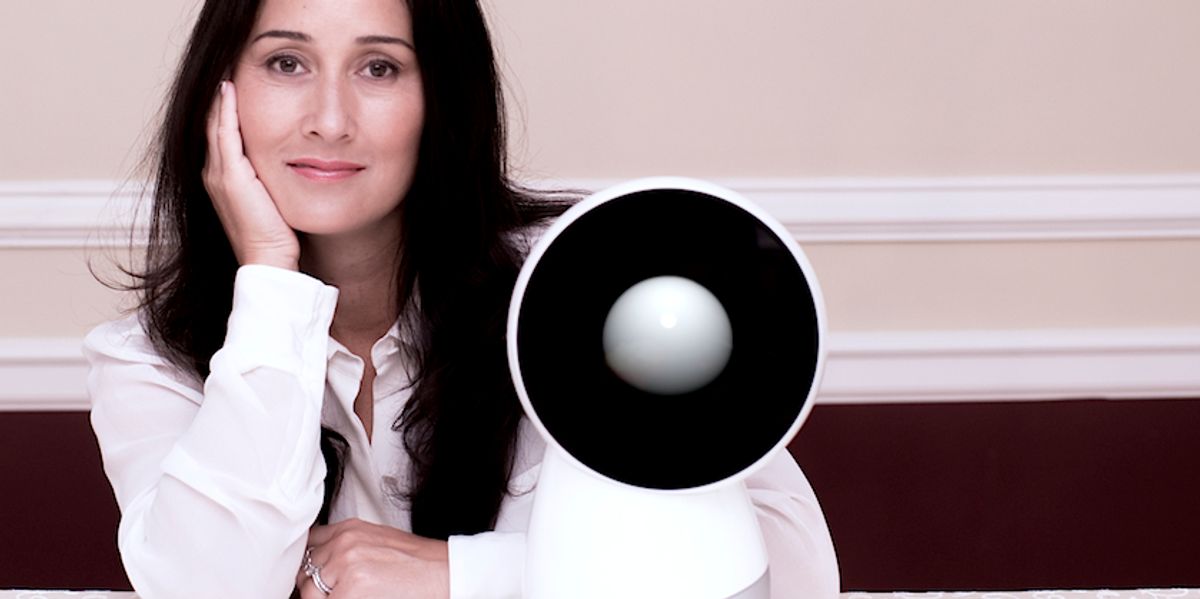
Kismet is an expressive robot head designed by Cynthia Breazeal, then a graduate student at the MIT Media Lab. The project was an early experiment in affective computing and social robotics. Kismet could display a range of emotions: calm, angry, disgust, interest, sad, happy, surprise. The name Kismet comes from a Turkish word meaning "fate" or sometimes "luck". Kismet currently resides at the MIT Museum in Cambridge, Mass. Breazeal is a professor of media arts and sciences at MIT, where she founded and directs the Personal Robots Group at the MIT Media Lab.
Specs
- Overview
Can perceive a variety of social cues and display emotions (happiness, sadness, anger, calmness, surprise, disgust, tiredness, and the state of sleep).
- Status
Inactive
- Year
1998
- Website
ai.mit.edu/projects/humanoid-robotics-group/kismet/kismet.html
- Height
- 38 cm
- Weight
- 7 kg
- Sensors
Four digital cameras, three microphones, 21 encoders.
- Actuators
Maxon DC servomotors
- Degrees of Freedom (DoF)
- 21 (Eyes: 3 DoF; Neck: 3 DoF; Ear: 2 DoF x 2; Eyelid: 1 DoF x 2; Lip: 4 DoF; Jaw: 1 DoF; Eyebrow: 2 DoF x 2)
- Materials
Aluminum frame
- Compute
Four Motorola 68332 microprocessors, nine networked 400 MHz PCs, dual 450 MHz PC running NT, and 500 MHz PC running Linux.
- Software
High-level perception system, motivation system, behavior system, motor skill system, and face motor system coded in L, a multi-threaded Lisp. Plus QNX real-time operating system, DECtalk voice synthesizer, and speech processing package developed at MIT by the Spoken Language Systems Group.
- Power
External power supply
- Cost
- $25,000 (hardware only)