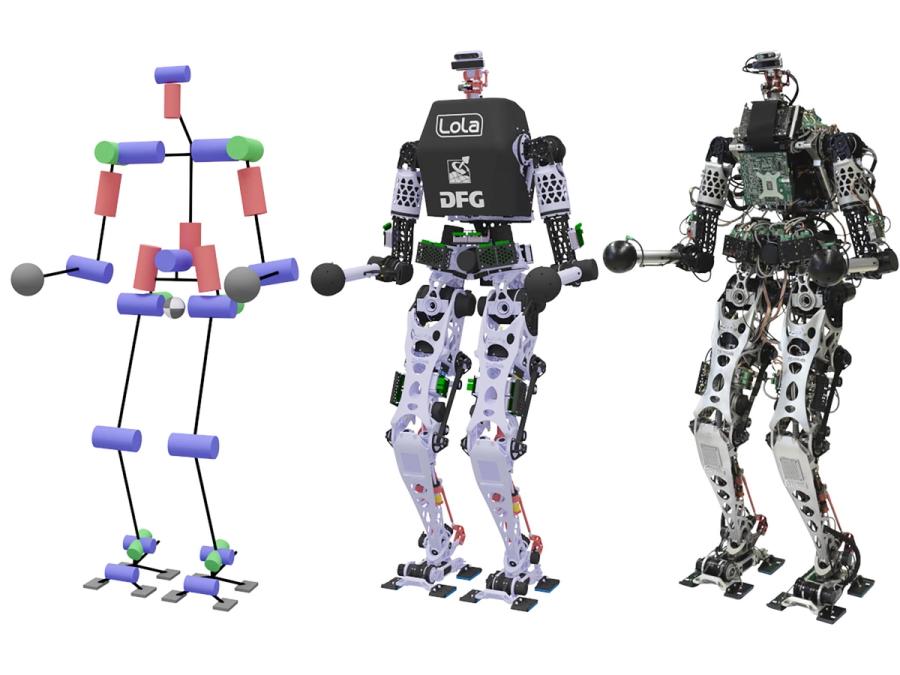
Lola

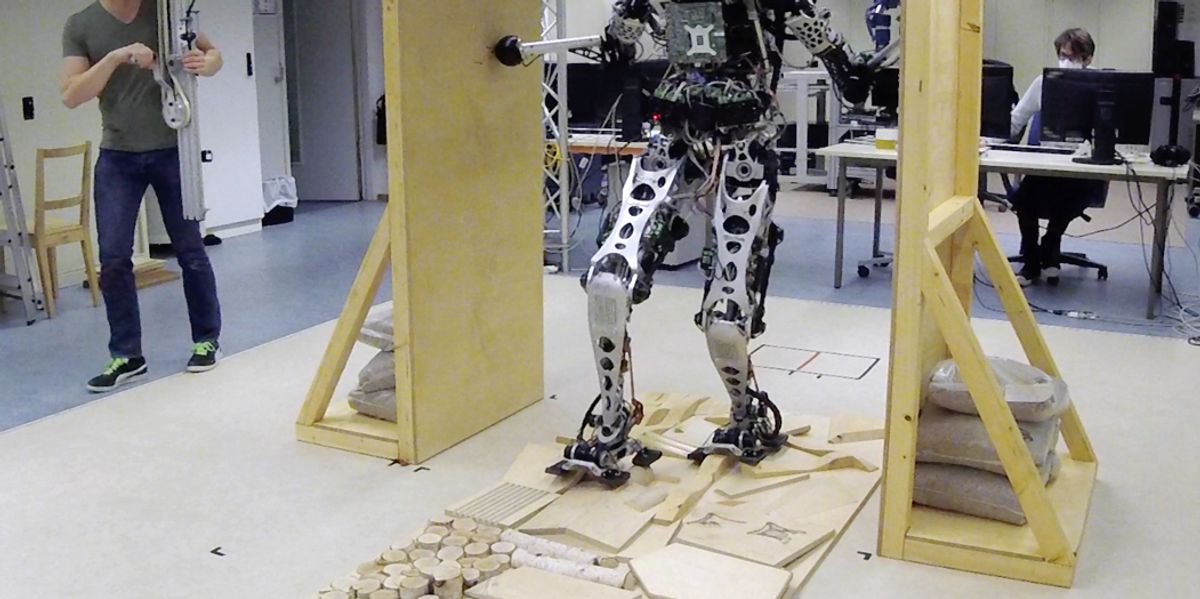
Lola is an advanced humanoid robot used in research on legged locomotion. It is a versatile, robust platform designed to demonstrate fast bipedal walking. The robot is mainly funded by the German Research Foundation (DFG).
- Creator
- Year
- 2010
- Country
- Germany 🇩🇪
- Categories
- Features
Did you know?
Lola is named after the German experimental thriller film "Run Lola Run."
Specs
- Overview
Full-sized humanoid with lightweight design. Robust to unexpected uneven and soft terrain. Can use hands for additional support.
- Status
Ongoing
- Year
2010
- Website
mec.ed.tum.de/en/am/research/current-projects/robotics/humanoid-robot-lola
- Width
- 65 cm
- Height
- 176 cm
- Length
- 43 cm
- Weight
- 68 kg
- Speed
- 3.38 km/h
- Sensors
Torso with iMAR iVRU-FC-C167 IMU. Feet with custom force-torque sensor. Hands with Schunk FTE-Axia80 force-torque sensor. Head with Intel RealSense T265 and D435 cameras. Joints with incremental (motor side) and absolute (link side) encoders.
- Actuators
Custom design with brushless DC motors and harmonic drive gears. Parallel kinematics in legs. Up to 380 Nm torque (knee joint with roller screw mechanism).
- Degrees of Freedom (DoF)
- 26 (Head: 2 DoF; Arm: 4 DoF x 2; Pelvis: 2 DoF; Leg: 7 DoF x 2)
- Materials
Aluminum, 3D printed titanium, stainless steel.
- Compute
Two mini-ITX industrial boards each with Intel Core i7-8700 (6x3.2 GHz) CPU and 32 GB DDR4 RAM; Nvidia Quadro P2000 GPU; ELMO servo controllers for each joint; EtherCAT communication bus.
- Software
QNX Neutrino RTOS 7.0 for control; Ubuntu 20.04 for computer vision; broccoli (https://gitlab.lrz.de/AM/broccoli).
- Power
24-V and 80-V circuit (external supply)