Mercury
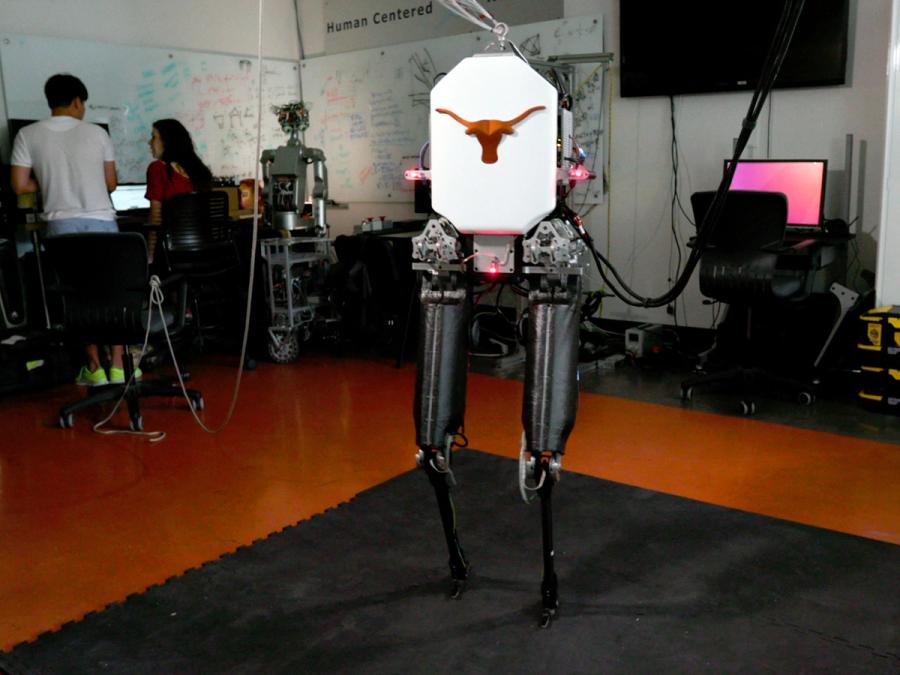
Mercury is an adult-sized bipedal robot designed to study highly dynamic locomotion. It has passive ankles, so it has to continuously take steps to stay balanced. Keep moving, Mercury.
- Creators
UT Austin, Meka Robotics, and Apptronik
- Year
- 2018
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
Mercury is named after the Roman god of travelers, typically depicted wearing winged sandals.

Specs
- Overview
Dynamically balances by continuously stepping. Precise trajectory tracking using series elastic actuators in all joints. Advanced inertial state estimation and feedback control systems. Whole-body controller can simultaneously handle high-level walking Cartesian tasks and arm based manipulation tasks.
- Status
Ongoing
- Year
2018
- Website
- Width
- 30 cm
- Height
- 150 cm
- Length
- 20 cm
- Weight
- 22 kg
- Speed
- 4 km/h (push recovery stepping)
- Sensors
STIM-300 inertial measurement unit (IMU). Optical encoders for motor position and spring deflection sensing. Absolute encoders for joint position sensing. Spring-loaded switch sensor for ground contact switching. PhaseSpace motion capture system.
- Actuators
Moog BN23-23 brushless DC motors and Meka 2011 linear series-elastic actuators.
- Degrees of Freedom (DoF)
- 6 (Leg: 3 DoF x 2)
- Materials
Carbon fiber torso, linkages and covers on legs, for rigidity. Aluminum series elastic drivetrains.
- Compute
Main computer with Intel Core i5-7300U 2.6 GHz, 4 GB RAM
- Software
RT-Preempt Ubuntu 16.04 (real time control), custom created Dynacore open-source whole-body locomotion controller
- Power
1-kW 48-V DC power supply
- Cost
- $150,000