Quince
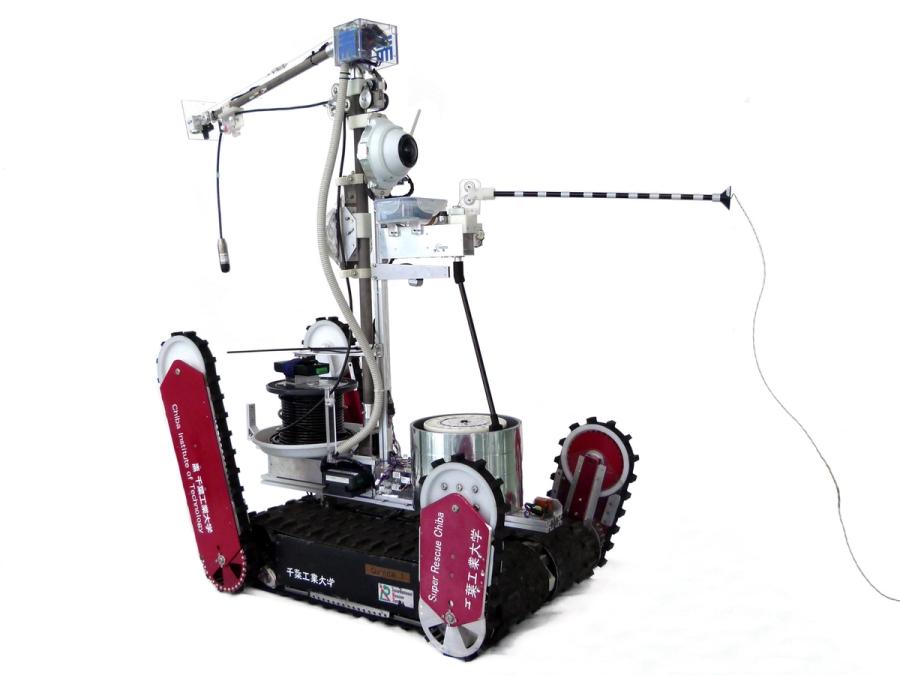
Quince is a remote control mobile robot packed with sensors. It is designed to enter areas that humans really shouldn't be going to, like buildings after earthquakes and crippled nuclear reactors.
- Creators
- Year
- 2011
- Country
- Japan 🇯🇵
- Categories
- Features
Did you know?
On 24 September 2011, Quince entered the crippled Fukushima nuclear plant to help assess damage and radiation levels.

History
Quince, developed as part of Japan's New Energy and Industrial Technology Development Organization (NEDO) program, was developed by a team of researchers led by Prof. Satoshi Tadokoro from Tohoku University and Prof. Eiji Koyanagi from Chiba Institute of Technology, with support from the International Rescue System Institute. A tank-like ground robot, Quince is capable of driving over rubble and climbing stairs. It was deployed to assist emergency responders in the search for survivors of the devastating earthquake and tsunami that struck Japan in 2011.

Specs
- Overview
Capable of carrying a variety of sensor payloads. Able to climb steep slopes and stairs.
- Status
Inactive
- Year
2011
- Website
- Width
- 48 cm
- Height
- 110 cm
- Length
- 110 cm
- Weight
- 45 kg
- Speed
- 5.76 km/h
- Sensors
Six cameras, three-axis gyroscope, three-axis accelerometer, temperature and humidity sensor, air dust sampler, laser scanner.
- Actuators
Seven motors
- Degrees of Freedom (DoF)
- 6 (Tracks: 2 DoF; Angle of sub-tracks: 4 DoF)
- Compute
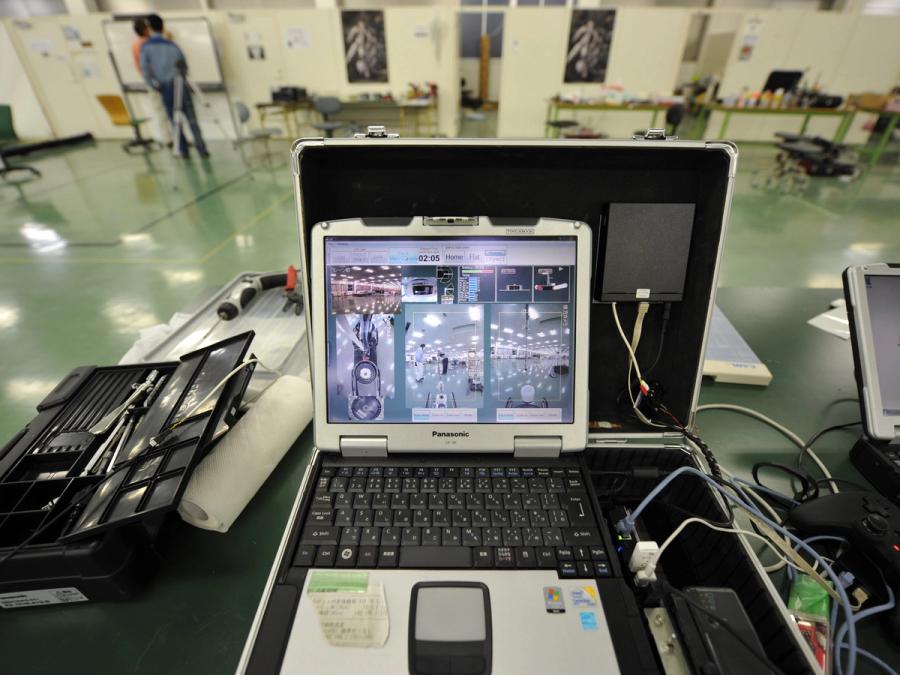
On-board embedded PC and four motor controllers. External rugged PC for operator.
- Software
Gentoo Linux OS. Windows 7 on remote computer.
- Power
Four 14.8-V 88-Wh lithium-ion batteries, 2 to 3 hours of operation







