LAURON V

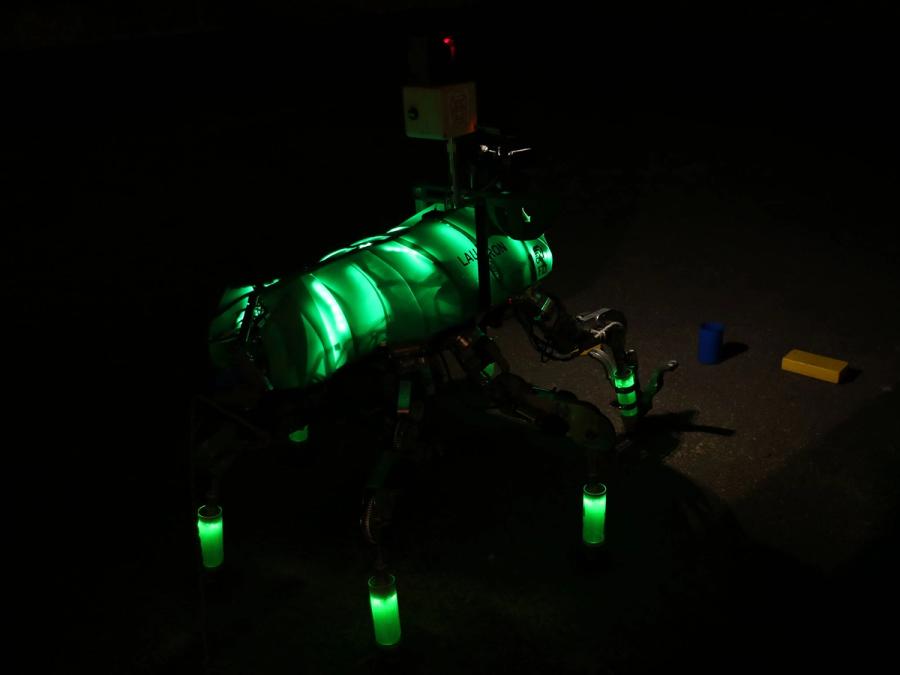
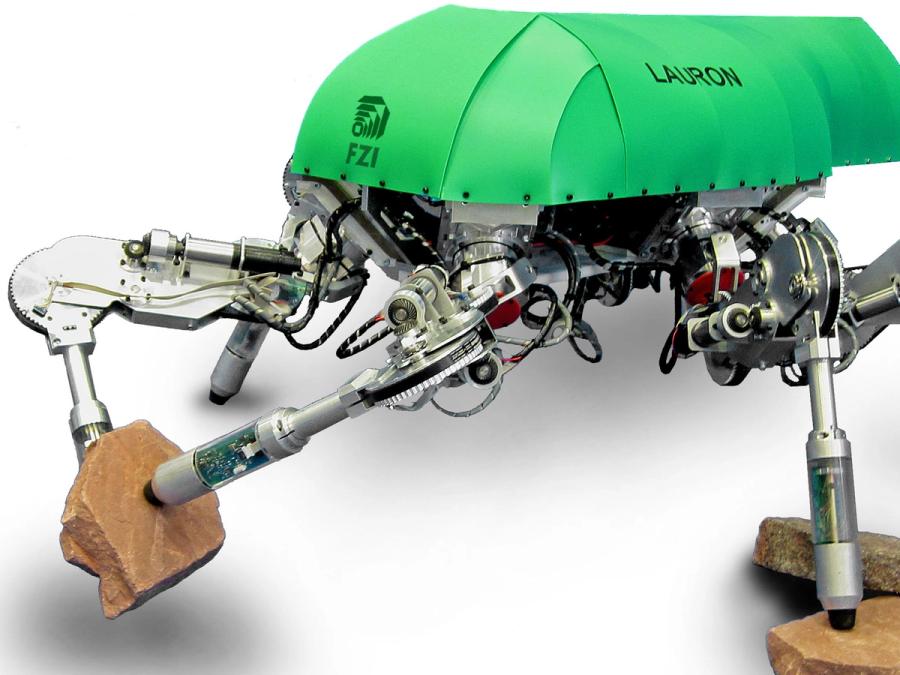
LAURON V is a bio-inspired six-legged walking robot designed to operate in areas that would be difficult for wheeled systems. It carries scientific payloads to monitor the environment and can use its legs for mobile manipulation tasks.
- Creator
- Year
- 2013
- Country
- Germany 🇩🇪
- Categories
- Features
Did you know?
The name LAURON stands for LAUfRoboter Neuronal Gesteuert, which in English means "walking robot neurally controlled," as the robot was originally fully controlled by neural networks.

More Images

Specs
- Overview
Able to perform fully autonomous exploration missions using 3D environment mapping, path planning, visual servoing, and other skills. Behavior-based control to handle slips and avoid falls. Leg length, walking patterns, and behaviors inspired by the common stick insect Carausius morosus.
- Status
Ongoing
- Year
2013
- Website
- Width
- 80 cm
- Height
- 61 cm (84 cm with legs fully extended)
- Length
- 90 cm
- Weight
- 43.5 kg
- Speed
- 0.5 km/h
- Sensors
Each leg has four joints with Avago HEDS9040-B00 rotary encoders and custom code wheels, as well as current monitoring for every motor by the custom UCOM Boards. The head carries an Asus Xtion Pro Live, two high resolution Point Grey Firefly (FMVU-12S2C) cameras with tele- and wide-angle lenses or stereo camera setup, and a FLIR thermal camera. The body carries an additional Asus Xtion Pro Live camera at the back (for visual odometry), a Velodyne HDL-32E or a custom 3D laser scanner (KaRoLa) using a Hukuyo UTM-30LX, Avago absolute encoder, and Microstrain 3DM-GX5 IMU. Additional sensors are added based on the mission.
- Actuators
28 motors in total. Each leg has four joints powered by Faulhaber 2657 012CR DC brushed motors with 26/1S planetary gearheads (ratio 66:1 and 159:1). Two motors are mounted on the side of the leg and drive the joints via a chain (additional 2:1 ratio). Two motors are mounted inside the body and actuate the moments via custom gearboxes including a worm drive. The head uses two smaller Faulhaber brushed DC motors with a custom 3D printed fixture and belt drive. The gripper and the rotating laser scanner use brushless Faulhaber 2250S024BX4 CSD motors with an integrated controller.
- Degrees of Freedom (DoF)
- 28 (Legs: 4 DoF x 6; Head: 2 DoF; Gripper: 1 DoF; Laser scanner: 1 DoF)
- Materials
Legs made from aerospace grade aluminum. Outer shell part milled POM plate (base), part 3D-printed PLA (base covers), and part custom cut PE (shell structure). Head and many covers for the gears and sensors and extensions such as a storage case are 3D-printed PLA. Gearboxes use high precision brass worm drives. All parts were custom designed and milled or printed.
- Compute
Main computer (behavior and high level control): Mini ITX board (GIGABYTE GA-H87N-Wifi) with Intel Core i7 4x3.0 GHz, 8 GB RAM, Ethernet and CAN communications. Vision computer (object detection, visual odometry): Intel NUC i7. Leg controller (low level motor control): UCOM Universal Controller Module, custom with DSP and FPGA providing real-time control, quadrature encoder readout, current measurements, initialization routines, synchronization, and communication. Additional controller: Arduino for light control and Raspberry Pi for 3D laser scanner.
- Software
Ubuntu 14.04 with ROS Indigo for high level control and MCA2 for low level control. High level control is done in the PLEXNAV framework, providing OMPL-based Planning, OpenCV, and PCL based object and environment recognition, SMACH based mission control, 3D SLAM with custom algorithms, custom motion executors and many many more packages both custom written and open source. Low level control is implemented in the custom MCA2 (Modular Controller Architecture) Framework using a behavior based approach. Fast behaviors govern the leg moments (swing, stance, hit obstacle reflex) while higher level behaviors keep the overall system stable. The motor controllers run cascaded PID position controllers.
- Power
Two 24-V, 8000-mAh lithium-polymer battery packs in parallel, 2 hours of operation. Ability to hot swap battery packs during operation. External supply by a laboratory power supply at 24-V (5-20 A, ~10A main power) can be used on the fly.
- Cost
- €150,000 (approximately)