Shadow Hand
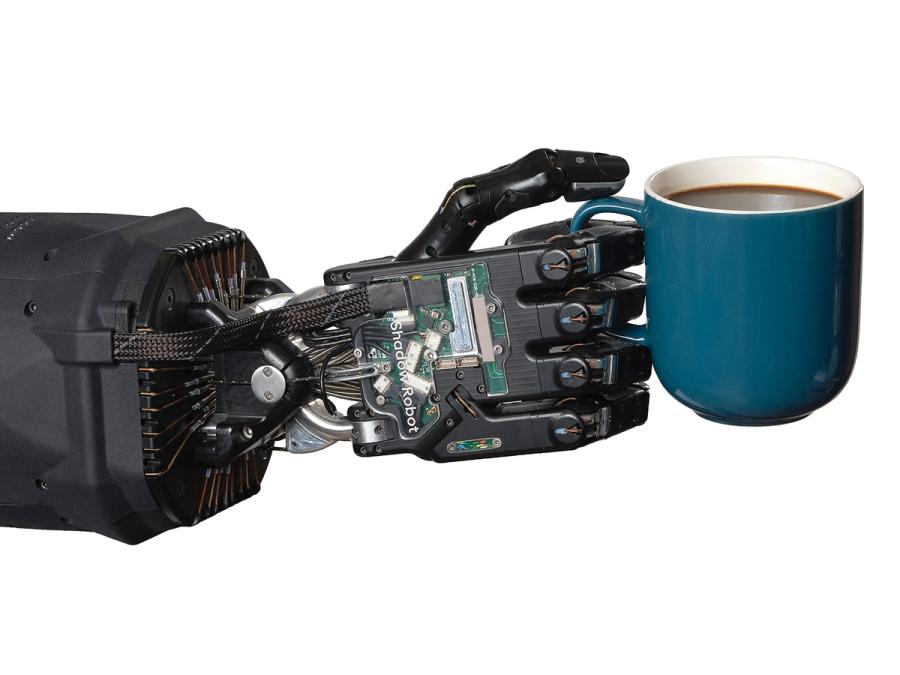
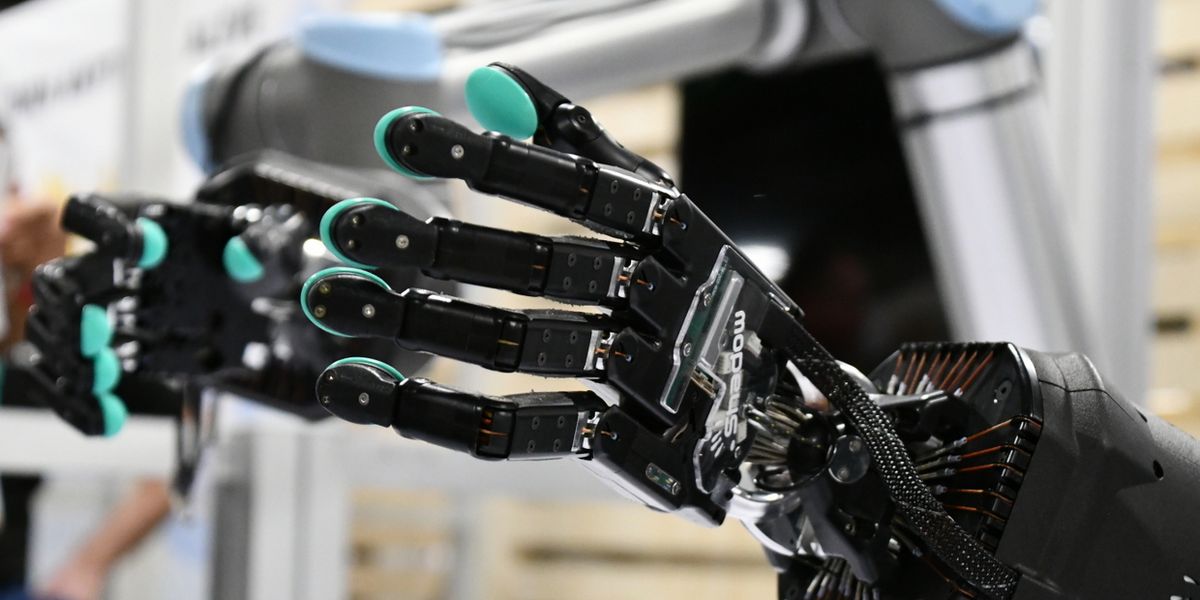
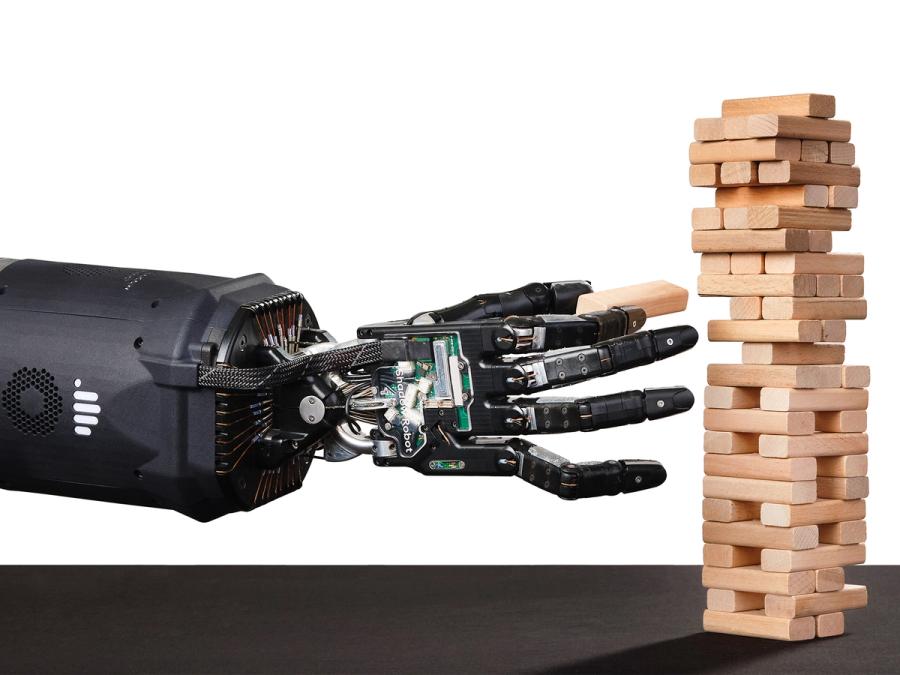
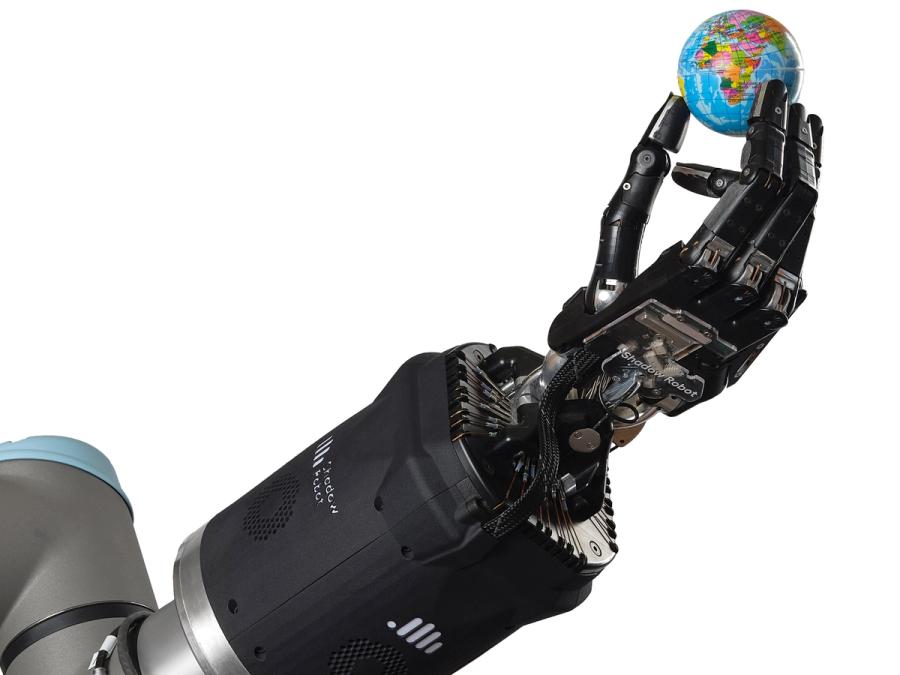
The Shadow Dexterous Hand is one of the most advanced robot hands in the world. It's designed to replicate as much of the functionality, dimensions, and range of motion of the human hand as possible.
- Creator
- Year
- 2004
- Country
- United Kingdom 🇬🇧
- Categories
- Features
Did you know?
Shadow's founder Richard Greenhill says the company began in 1987 as a hobbyist group that'd gather in the attic of his London home. His wife would cook a big pot of spaghetti and the group would work through the night fuelled by copious amounts of tea and coffee.

More Images


Specs
- Overview
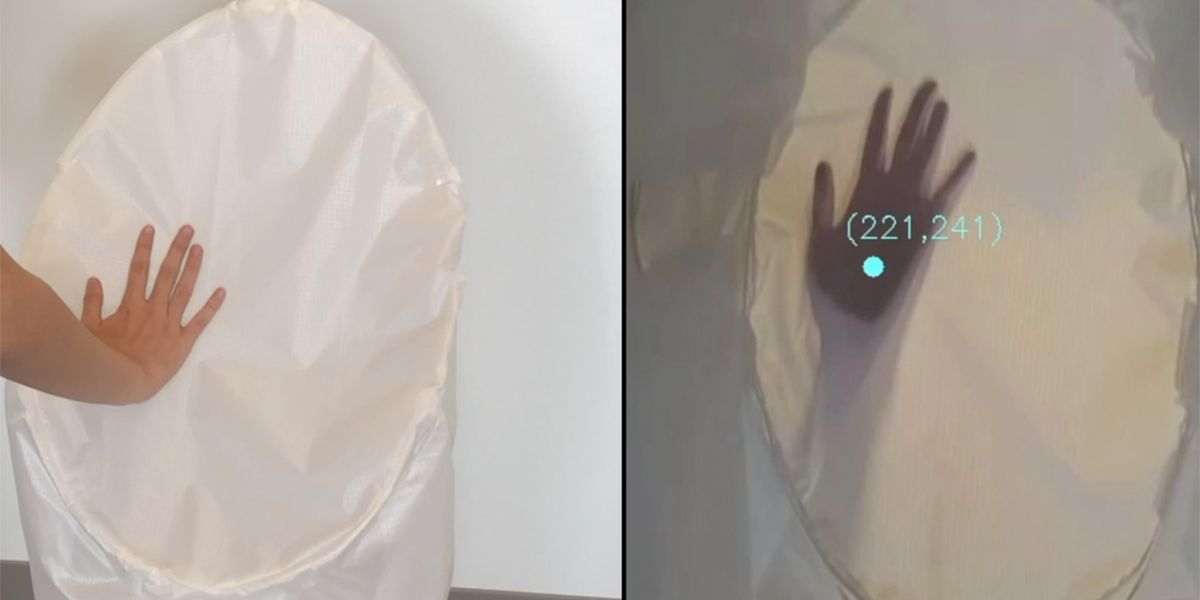
For teleoperation and telepresence applications, the Shadow Hand can be combined with tactile sensors and controlled via a haptic glove for touch-feedback, enabling users to perform manipulation tasks at a remote location without physically being there. Anthropomorphic design mimics size, shape, and degrees of freedom of the human hand. Equipped with position and tactile sensors in the hand.
- Status
Ongoing
- Year
2004
- Website
- Width
- 13.5 cm
- Height
- 44.8 cm
- Length
- 13.5 cm
- Weight
- 4.3 kg
- Sensors
Six-axis gyro and accelerometer, joint angle sensors, force-torque sensors, tactile sensors, current and temperature sensors.
- Actuators
20 Maxon motors using PWM. Each motor node implements a PID controller, which can be set to do force control on the tendons at the motor end or position control on the joints.
- Degrees of Freedom (DoF)
- 24 (24 total DoF. 20 actuated DoF. Finger: 3 DoF x 4; Thumb: 5 DoF; Palm: 1 DoF; Wrist: 2 DoF)
- Materials
Combination of metals and plastics including aluminium, brass, acetyl, polycarbonate, and polyurethane flesh.
- Compute
Multi-core laptop running Ubuntu with EtherCAT compatible network ports.
- Software
Custom software based on the Robot Operating System (ROS). Software in the host PC provides sensor calibration and scaling, mappings from sensor names to hardware, and easy access to all robot capabilities from Python and C++.
- Power
48-V 2.5-A power supply
- Cost
- £50000-90000 (depending on configuration)