Hand Arm System
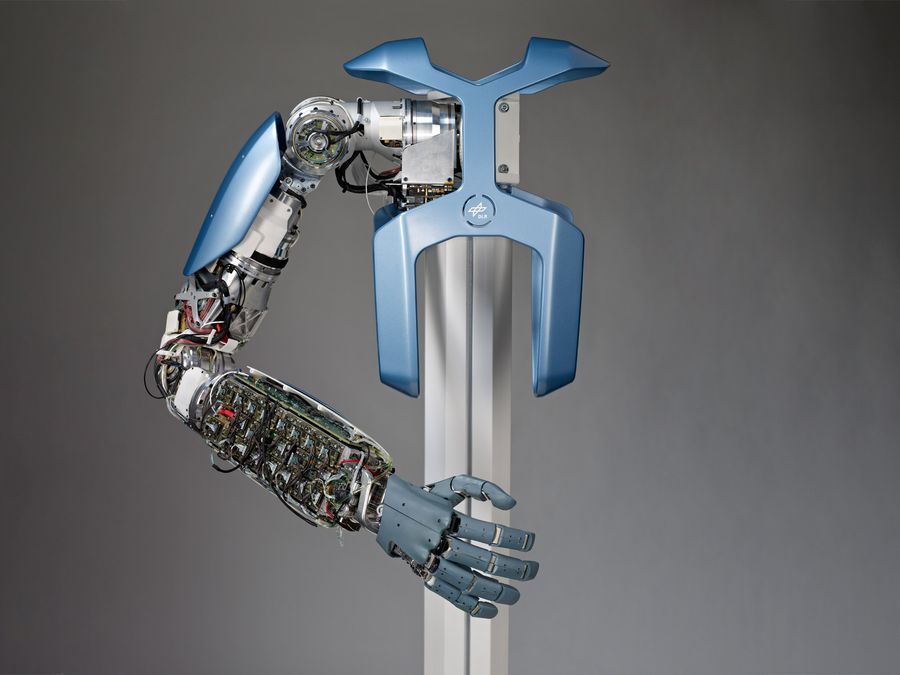
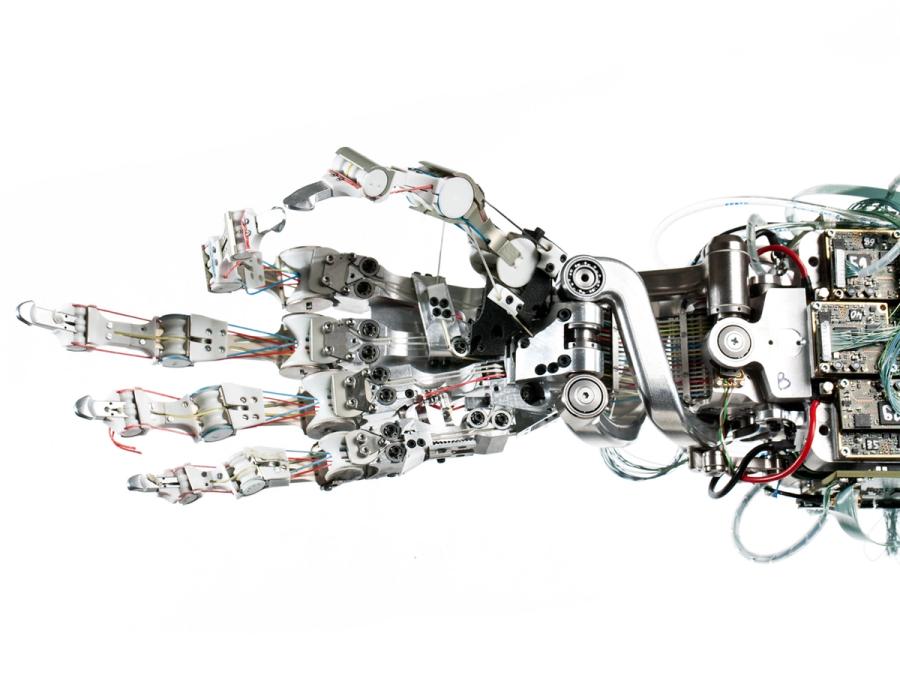
The Hand Arm System is designed to have the size, strength, and speed of a human arm. It uses superstrong cables as tendons, and its aluminum endoskeleton makes it look like the Terminator's hand.
- Creator
- Year
- 2010
- Country
- Germany 🇩🇪
- Categories
- Features
Did you know?
To assess the robustness of their robot arm, the researchers did what you'd expect from any self-respecting roboticist: They smashed the robot with a baseball bat.

History
The Hand Arm System is the culmination of decades of research in robot manipulation by researchers at the Institute of Robotics and Mechatronics, headed by Prof. Alin Albu-Schäffer, part of the German Aerospace Center (DLR). The main motivation for the project is the fact that when robots perform tasks in the real world, they inevitably collide with objects, the environment, and even people. For that reason, the DLR researchers believe that future robots have to be able to handle collisions without suffering or causing damage. The DLR Hand Arm System uses elastic components capable of storing energy and actuators capable of changing their stiffness to achieve the robustness needed against collisions. The Hand Arm System is currently used as a platform for advancing dexterous manipulation and for exploring new applications in robotics.
Specs
- Overview
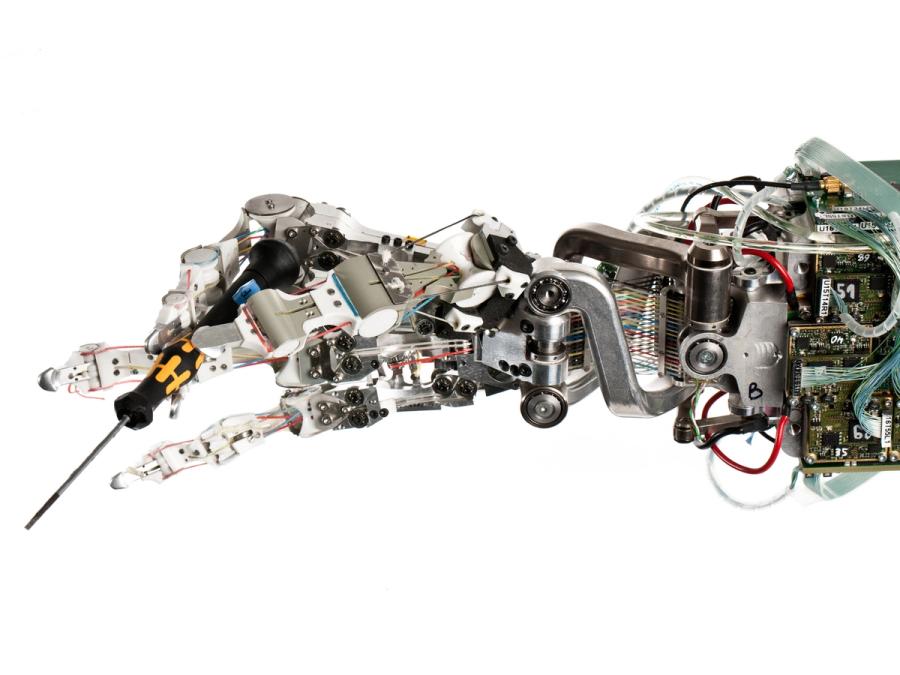
Anthropomorphic design. Able to withstand shocks and impacts. Equipped with actuators with variable stiffness and fast dynamic response.
- Status
Ongoing
- Year
2010
- Website
- Length
- 120 cm
- Weight
- 13.5 kg (including shoulder)
- Sensors
112 position sensors. Force sensing performed by the actuators.
- Actuators
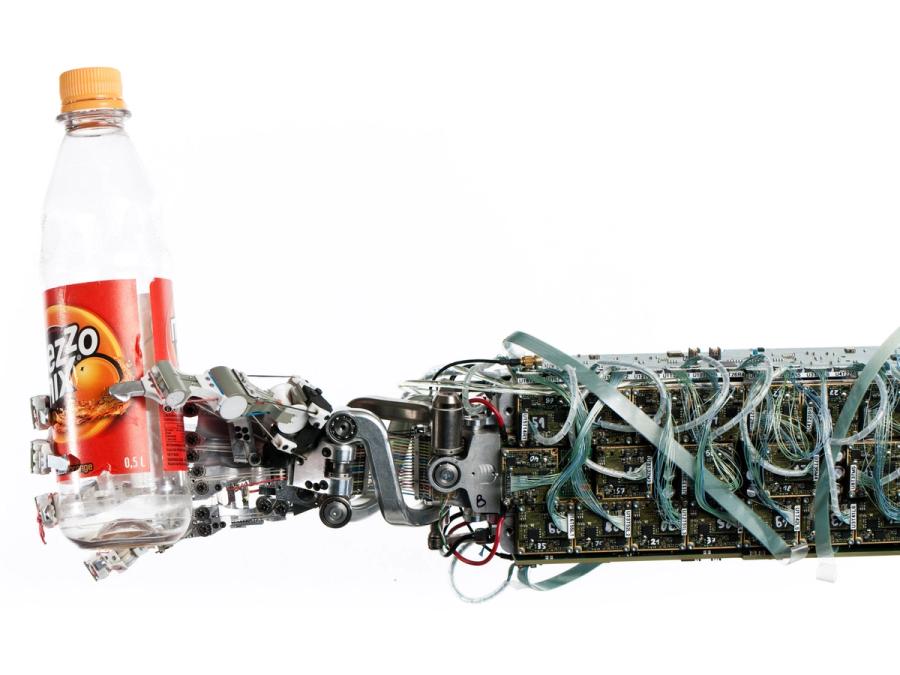
52 motors (two motors per joint, used for variable stiffness and antagonistic drive)
- Degrees of Freedom (DoF)
- 52 (26 degrees of motion and 26 degrees of freedom for variable stiffness)
- Materials
Aluminum based endoskeleton. Low friction plastics for finger joint bodies. Hard plastic arm housings.
- Compute
Intel-based computing nodes and programmable logic devices (FPGA/CPLD). Computing nodes connected by high-speed SpaceWire packet communication network.
- Software
QNX real-time OS with hardware abstraction layer and Matlab Simulink interface for control applications.
- Power
Tethered







