Skydio R1

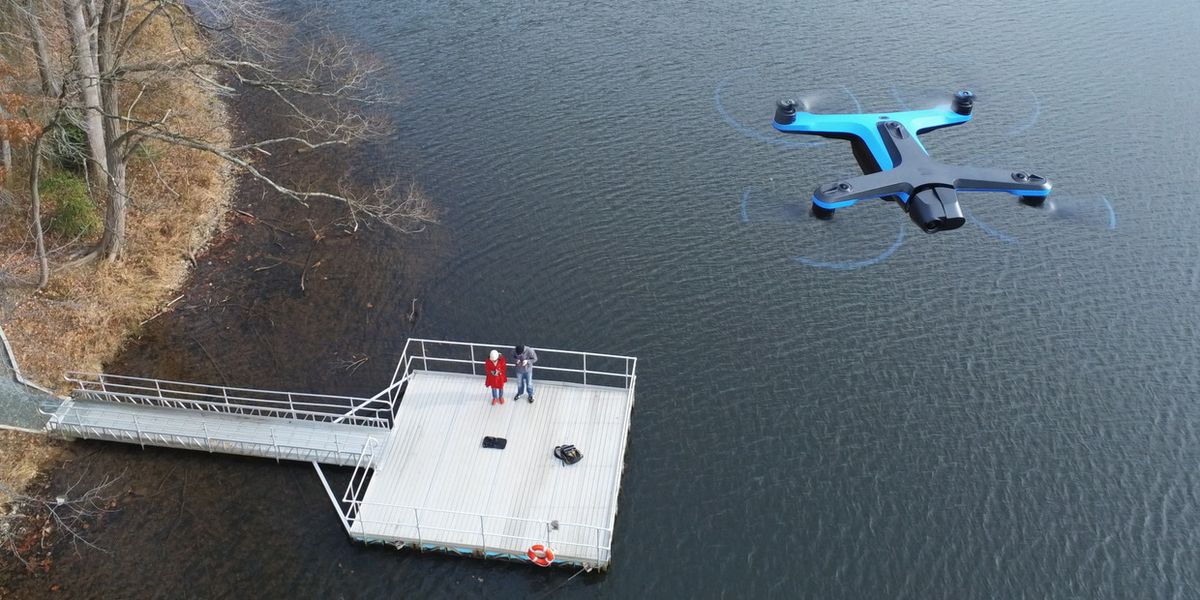
R1 is an autonomous camera drone that can track and follow a person or vehicle while capturing high-quality video and nimbly avoiding obstacles. It uses AI algorithms and 13 cameras for real-time navigation and subject tracking.
- Creator
- Year
- 2018
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
R1 uses simultaneous localization and mapping (SLAM) to construct and update a map of an environment, and keep track of a person's location within it.

History
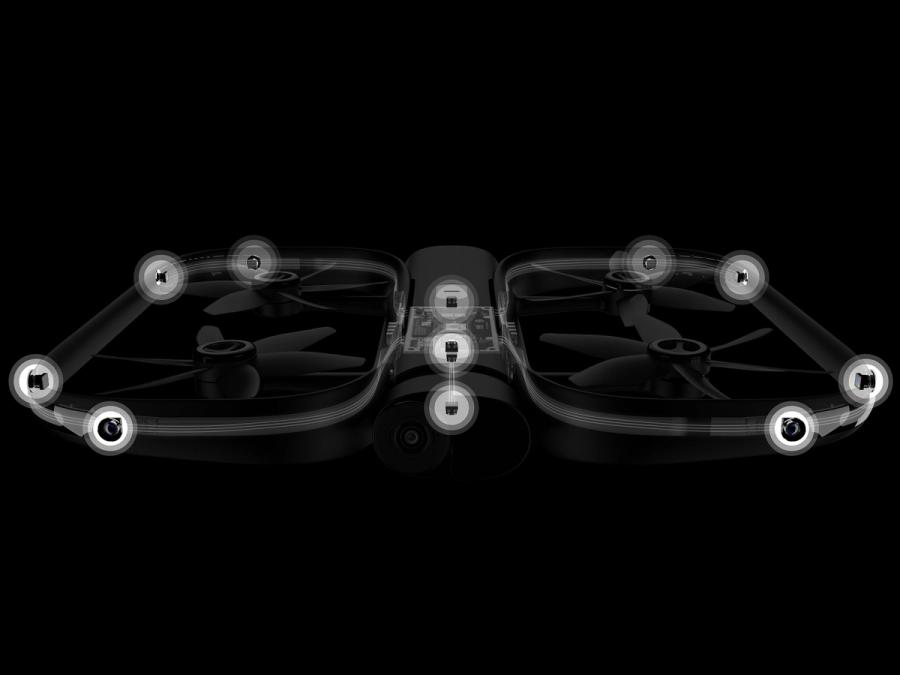
Skydio was founded by Adam Bry, Abraham Bachrach, and Matt Donahoe, who met as grad students at MIT in 2009 where they worked on autonomous drone technology. After MIT they helped start Google's Project Wing, and in 2014 they founded Skydio, headquartered in San Mateo, Calif. In 2018 the company launched the Skydio R1, an autonomous drone for consumers and a platform for commercial development. The system that Skydio uses for autonomous navigation is entirely vision-based. There are 12 navigation cameras spaced all around the drone, including cameras that look down and up, and managing this massive inpouring of visual data is 256 cores worth of Nvidia TX1 GPU. Using machine learning, the Skydio drones are able to detect and avoid obstacles, and tracks a specific person and follow them while it does. In 2019, the company introduced its second-generation drone, Skydio 2, with a host of new autonomy features.
Specs
- Overview
4K video capture. Hands-free operation with autonomous flight, tracking of people or vehicles, and dense obstacle avoidance.
- Status
Ongoing
- Year
2018
- Website
- Width
- 40 cm
- Height
- 3.8 cm
- Length
- 33 cm
- Weight
- 1 kg
- Speed
- 40 km/h
- Sensors
12 navigation cameras for omnidirectional vision. One user video camera. Four inertial measurement units. GPS and barometer.
- Actuators
4 motors
- Materials
Carbon fiber (rotor guards), aluminum (fuselage)
- Compute
NVIDIA Jetson TX1 with quad-core ARM CPUs, 4 GB RAM, and 256 CUDA cores (1 teraflops of performance)
- Power
Rechargeable lithium-polymer batteries, 16 minutes of flight time
- Cost
- $2,499