AILA

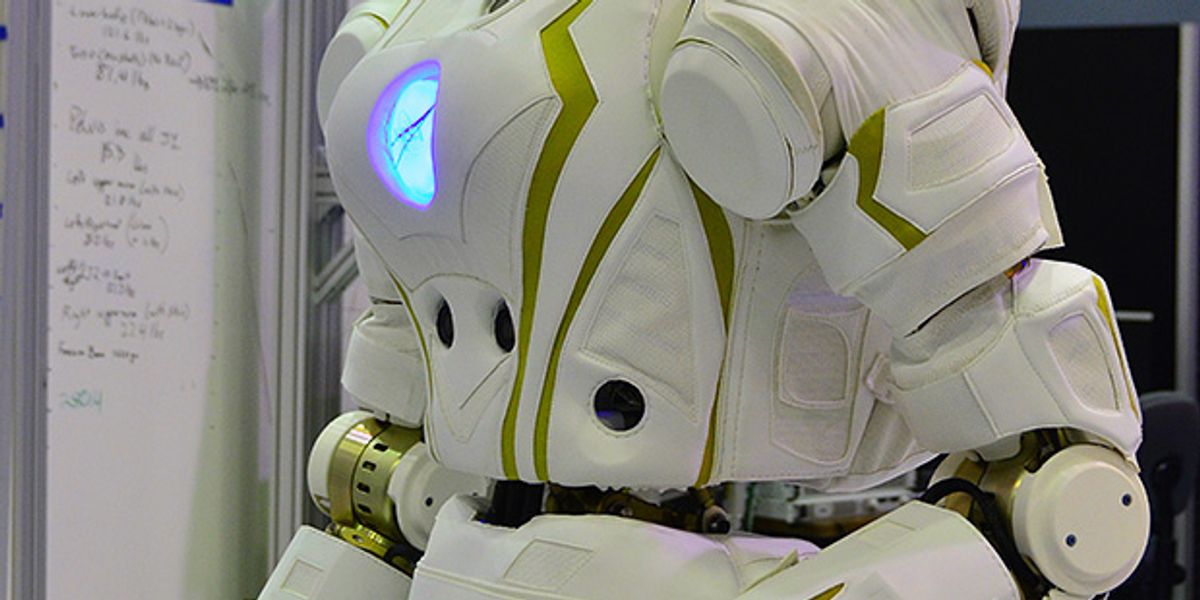
AILA is a humanoid robot used by researchers to study mobile manipulation, robot perception, and AI. It's learning to perform tasks in human environments and training to become an astronaut.
- Creator
- Year
- 2010
- Country
- Germany 🇩🇪
- Categories
- Features
Did you know?
AILA stands for Artificial Intelligence Lightweight Android.

History
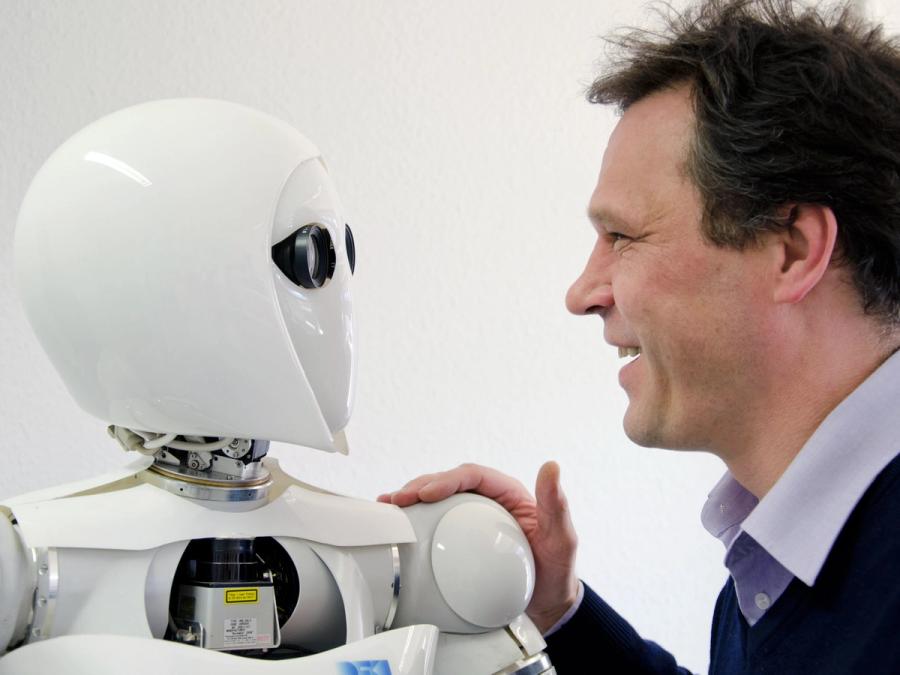
Frank Kirchner started building legged robots as a tool to study machine learning and artificial intelligence in the 1990s, first as a researcher at the University of Bonn, Germany, and later at Northeastern University, in the United States. Now the head of the Robotics Innovation Center at the German Research Center for Artificial Intelligence (DFKI), Kirchner created the humanoid AILA to investigate robotics control, cognition, and learning in real-world environments. The goal is to use AILA to explore systems with increasing complexity, in terms of both mechanisms and algorithms. Among the upgrades planned for AILA is giving it something it still doesn't have: a pair of legs.
Specs
- Overview
Equipped with a six-wheel mobile base. Able to create maps and navigate autonomously. Lightweight arm able to lift up to 8 kg (17.6 lb).
- Status
Inactive
- Year
2010
- Website
- Width
- 75 cm
- Height
- 173 cm (including mobile base)
- Length
- 115 cm
- Weight
- 97 kg
- Speed
- 8 km/h
- Sensors
Head with two cameras. Torso with short-range laser scanner and 3D time-of-flight camera. Arms with two six-axis force/torque sensors. Hands with tactile sensors. Mobile base with two long-range laser scanners.
- Actuators
14 brushless DC motors for the arms, 4 linear dc motors for the torso, 12 motors on the wheels, 2 servos for the head.
- Degrees of Freedom (DoF)
- 50 (Head: 2 DoF; Arm: 7 DoF x 2; Hand: 9 active DoF x 2; Torso: 4 DoF; Mobile base: 12 DoF)
- Materials
Carbon fiber, aluminum, steel.
- Compute
Three embedded PCs with dual core CPUs for motion control, navigation, and vision processing. Each arm joint with custom FPGA-based controllers.
- Software
Linux OS and custom software based on ROS (communication layer), ROCK (middle layer), and Roby (high level).
- Power
48-V 4.5-Ah nickel-metal hydride battery, 0.5 hour of operation.