Rollin' Justin

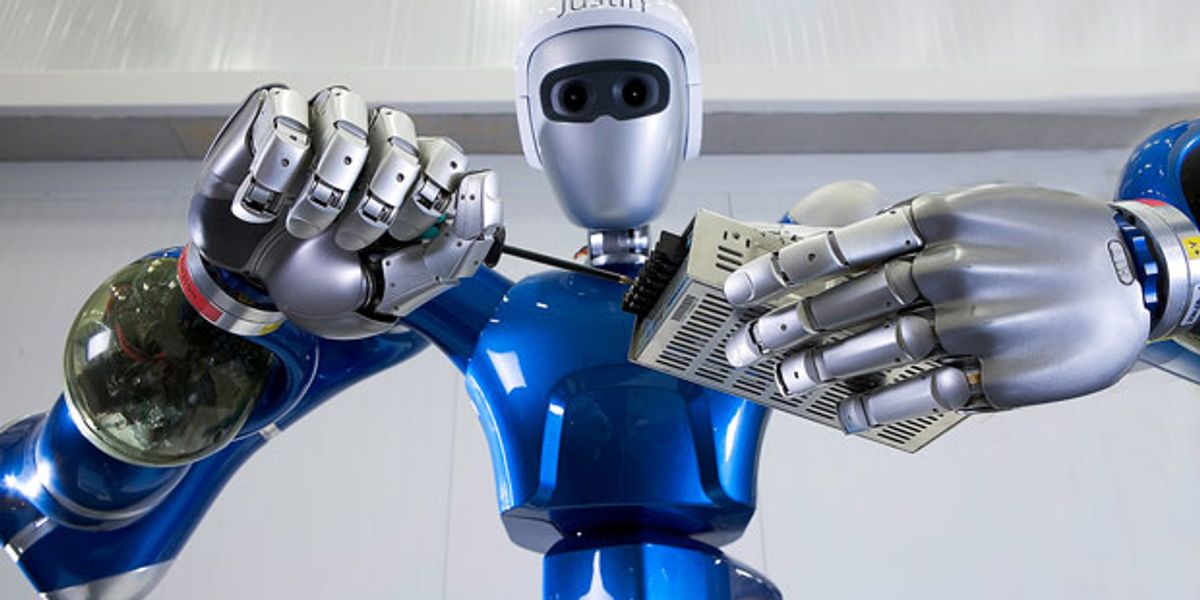
Rollin' Justin is a dexterous humanoid robot used to research robotics applications in home and industrial settings and in space. It can catch balls, make coffee, and is learning to fix satellites.
- Creator
- Year
- 2008
- Country
- Germany 🇩🇪
- Categories
- Features
Did you know?
If you tell Justin to "dance like in Pulp Fiction," the robot will immediately start performing like John Travolta in the famous movie scene.

History
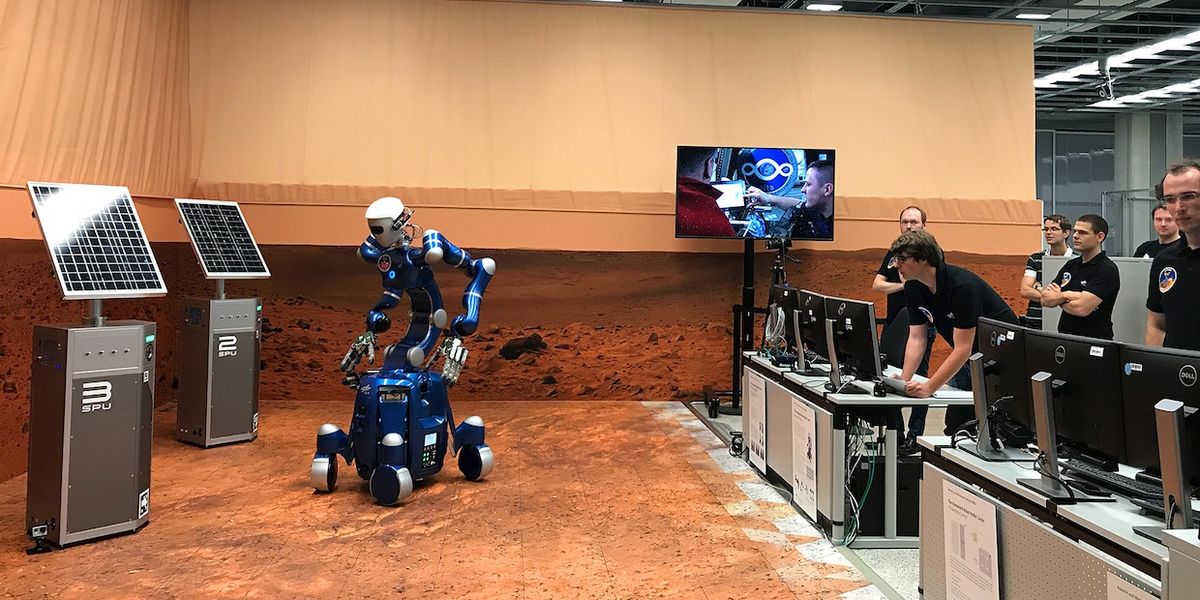
Led by Prof. Alin Albu-Schäffer, the Institute of Robotics and Mechatronics, part of the German Aerospace Center (DLR), has been developing lightweight robot arms and hands since 1995. In 2006, researchers combined two arms, hands, and a torso to build the first Justin upper body, mounted on a table. In 2008, a wheeled base was added, and Rollin' Justin made its debut. In 2012, the current system was equipped with an improved control system for the mobile base and an updated computing platform. In a 2017 teleoperation experiment, an astronaut on board the International Space Station remotely operated Rollin' Justin in a simulated Mars environment constructed at a DLR facility in Oberpfaffenhofen, near Munich.

Specs
- Overview
Capable of manipulating hard and soft objects. Equipped with compliant arms and collision detection. Has autonomous and teleoperation modes.
- Status
Ongoing
- Year
2008
- Website
- Width
- 82 cm
- Height
- 195 cm
- Length
- 82 cm
- Weight
- 199 kg
- Speed
- 6 km/h
- Sensors
Stereo cameras, gyroscope, accelerometers.
- Actuators
51 servomotors
- Degrees of Freedom (DoF)
- 58 (Head: 3 DoF; Arm: 7 DoF x 2; Hand: 13 DoF x 2; Torso: 3 DoF; Base 3 DoF x 4)
- Compute
Four Mini-ITX boards with Intel Core i7 quad-core processors.
- Software
QNX real-time OS and Linux OS with custom control software.
- Power
52-V battery, 1.5 hour of operation