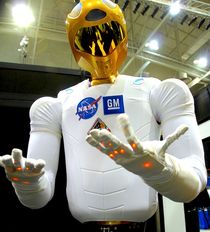
Robonaut 2

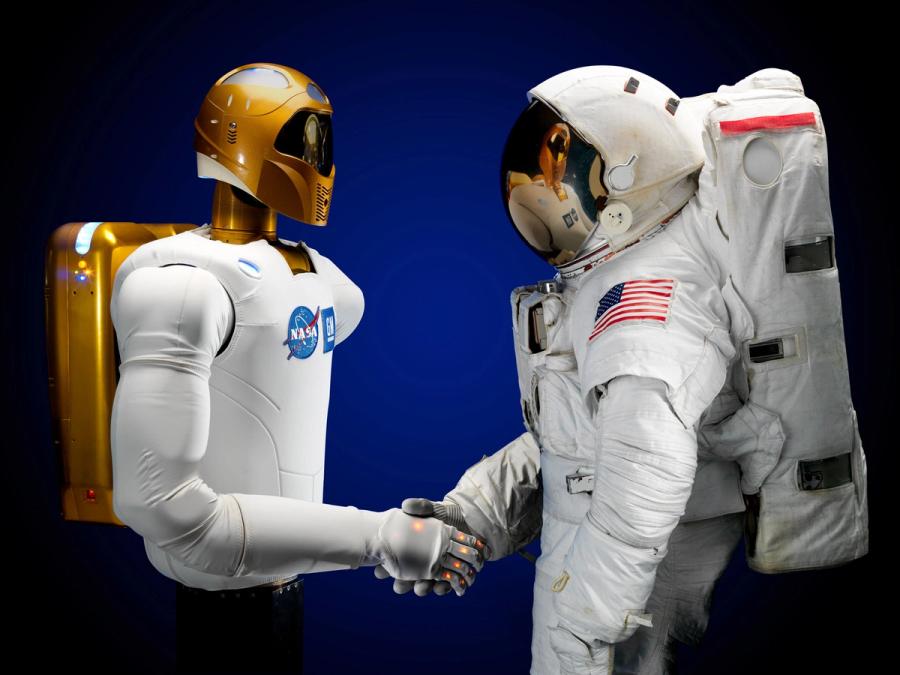
Robonaut 2 is a humanoid sent to the International Space Station to help astronauts with various tasks. It can grasp objects, flip switches, and high-five crew members after successfully performing tasks.
- Creators
- Year
- 2010
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
In May 2018, after seven years in orbit, Robonaut returned to Earth for repairs. NASA says it may go back to space, once fixed.
History
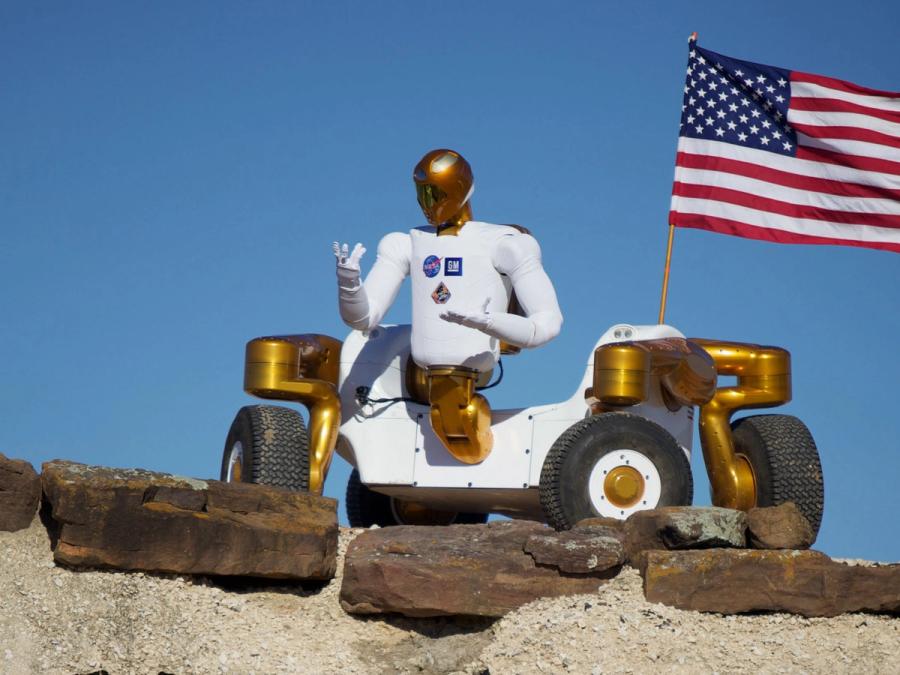
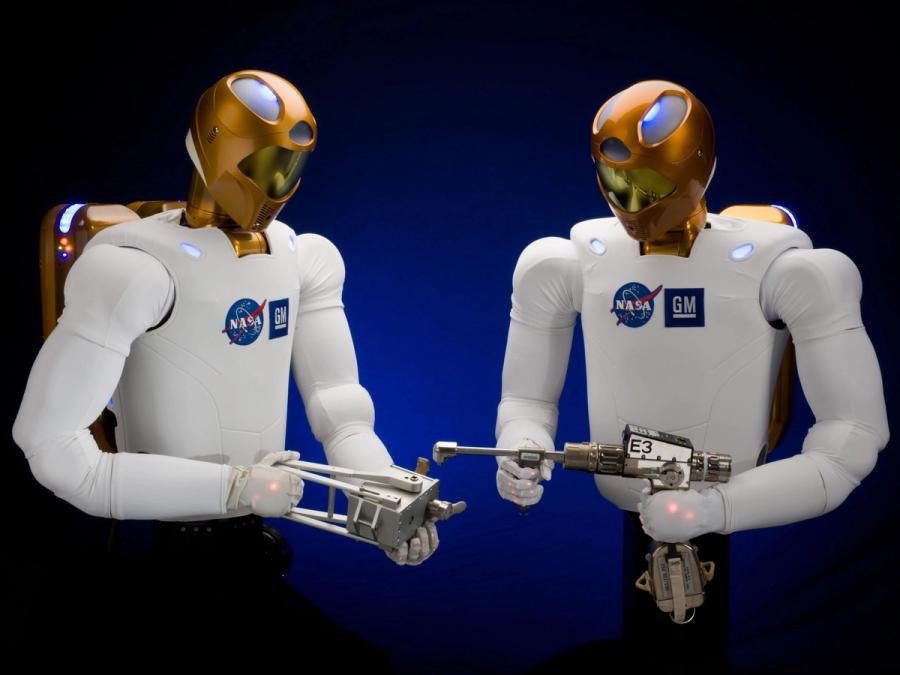
The Robonaut project began in 1997 with the goal of developing a humanoid robot that could assist astronauts with a variety of manipulation tasks. The result was R1, a prototype robot that could perform maintenance tasks or be mounted on a set of wheels, designed by the Robot Systems Technology Branch at NASA's Johnson Space Center (JSC) in a collaborative effort with DARPA. In 2007, NASA JSC and General Motors teamed up to develop a next-generation Robonaut. R2 was unveiled in 2010, and NASA mission managers were so impressed that they decided to make room on a shuttle mission and send the robot to the International Space Station (ISS). R2 was carried to the ISS aboard space shuttle Discovery in February 2011. The goal was exploring how dexterous robots would behave in space, and determining what upgrades were needed to allow Robonaut to take over tasks too dangerous or repetitive for astronauts, hoping it would one day be able to venture outside the station to help spacewalkers make repairs and perform scientific work. Unfortunately, a mysterious hardware problem kept Robonaut out of action since at least 2015, so in 2018 it returned to Earth for repairs. The latest member of the Robonaut family is R5, known as Valkyrie, an advanced bipedal humanoid designed and built at NASA JSC to compete in the 2013 DARPA Robotics Challenge.
More Images


Specs
- Overview
Dexterous manipulation of human tools. Able to lift 9 kg (20 lb). Equipped with autonomous and teleoperation modes (from the ISS or Earth).
- Status
Ongoing
- Year
2010
- Website
- Width
- 78.74 cm
- Height
- 101.6 cm (waist to head)
- Weight
- 149.7 kg
- Sensors
More than 350 sensors, including custom six-axis load cells in the hands, four cameras behind the visor (two for stereo vision and two auxiliary), and infrared camera in the mouth area for depth perception.
- Actuators
54 servomotors
- Degrees of Freedom (DoF)
- 42 (Arm: 7 DoF x 2; Hand: 12 DoF x 2; Neck: 3 DoF; Waist: 1 DoF)
- Materials
Primarily aluminum with steel.
- Compute
38 PowerPC processors
- Power
Power conversion system housed inside backpack for tethered operation. Backpack with batteries for untethered operation.
- Cost
- $2.5 million