Cody

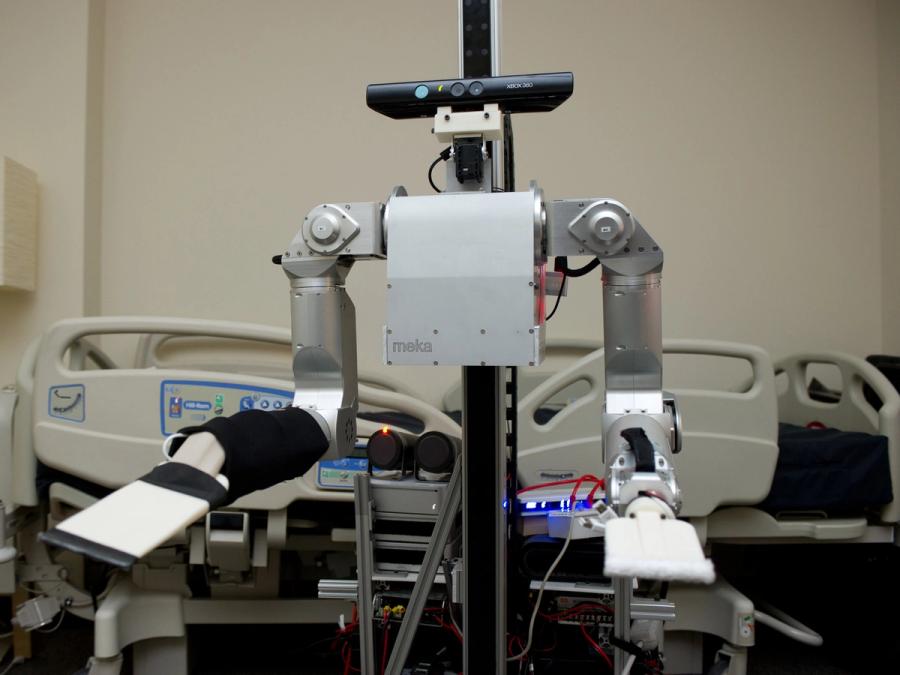
Cody is a robotic nurse created to assist individuals with disabilities. It's designed to support research into human-robot interaction with an emphasis on tasks relevant to healthcare.
- Creator
- Year
- 2009
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
Cody's omnidirectional base allows the robot to move in any direction without having to turn first.

Specs
- Overview
Equipped with compliant arms and an omnidirectional mobile base. Able to lift its torso using a linear actuator.
- Status
Inactive
- Year
2009
- Website
- Width
- 75 cm
- Height
- 155 cm
- Length
- 65 cm
- Weight
- 136 kg
- Speed
- 1.26 km/h
- Sensors
Point Grey Dragonfly camera, Microsoft Kinect, pressure-sensing tactile array (in the forearm), ATI force-torque sensors (wrist).
- Actuators
Meka A1 arms with series elastic actuators, Festo linear actuator, Segway RMP 50 Omni mobile base.
- Degrees of Freedom (DoF)
- 18 (Arms: 7 DoF x 2; Mobile base: 3 DoF; Linear actuator: 1 DoF)
- Materials
Aluminum 80/20 framing system.
- Compute
Two Mac Minis and one Dell Studio Hybrid (real-time PC for the arms).
- Software
Ubuntu Linux OS and control software written in Python (with a variety of open source packages, including ROS, SciPy, KDL, and OpenCV).
- Power
Standard 120-V power supply or three lithium-polymer batteries.







