Cog

Cog was a humanoid robot designed by Rodney Brooks's group at MIT as a platform to study robot cognition. It could track faces, grasp objects, and, perhaps most famously, play with a Slinky.
- Creator
- Year
- 1993
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
The name "Cog" is a play on the term "cognition" and a mechanical cog.

History
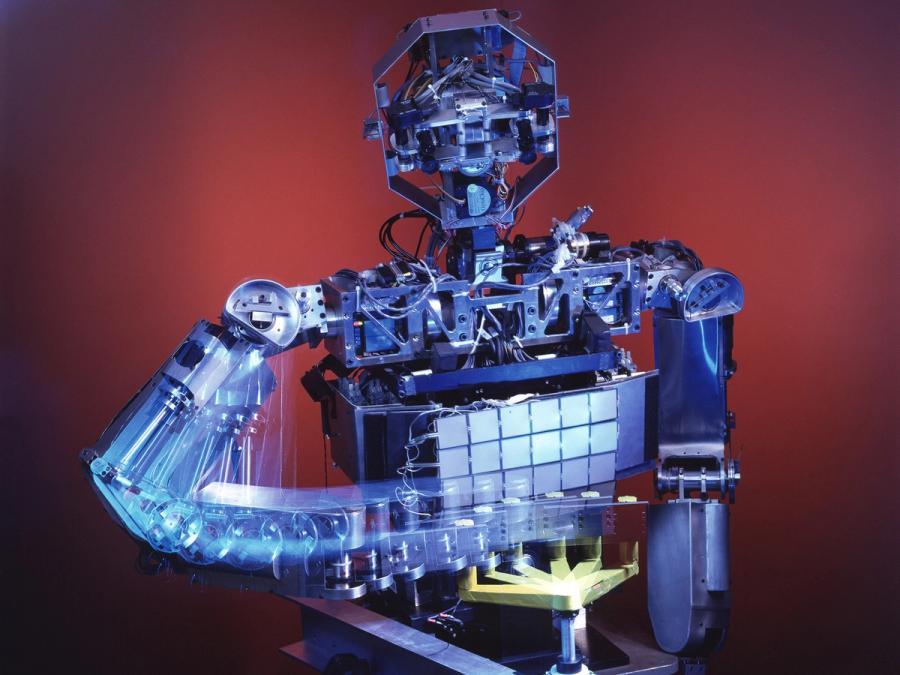
Development of Cog started in 1993 at Rodney Brooks's lab at MIT. The robot's first incarnation was as a 14-DOF upper torso with one arm and a rudimentary visual system. The robot was later upgraded to include two arms, a head, and more sensors. Many graduate students worked on the robot, including Brian Scassellati (now a Yale professor), Aaron Edsinger (founder of Meka Robotics and Hello Robot), and Cynthia Breazeal (now an MIT Media Lab professor). There were no blueprints or schematics. "The robot is just hack on a kludge to a 'temporary solution,' held together with Velcro, 24AWG wire, and solder," the researchers wrote on their website, only half jokingly. Cog was one of the first humanoid robots to use series elastic actuators: The motors on the arms were connected to the joints in series with a torsional spring, which protected the gearbox and provided compliance and more safety for people interacting with the arms.

Specs
- Overview
Able to recognize objects and reach for a visual target. Equipped with series elastic actuators for safer operation around people.
- Status
Discontinued
- Year
1993
- Website
- Width
- 200 cm
- Height
- 172 cm (including pedestal)
- Sensors
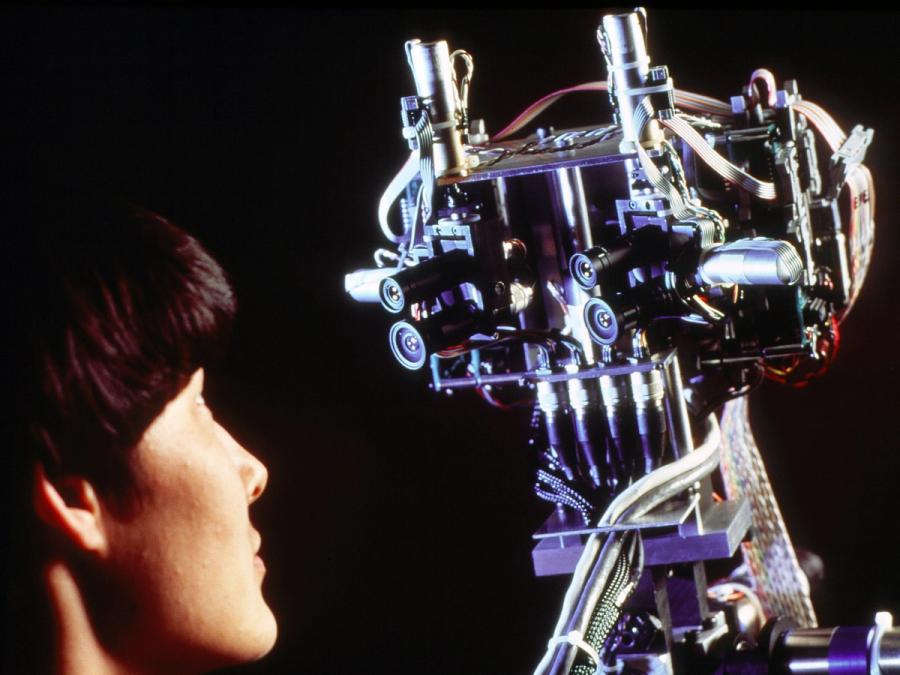
Each eye with two cameras (one wide and one narrow field of view), three-axis inertial system, load cells in each joint, optical encoders, array of tactile sensors, two microphones. Various limit switches, pressure sensors, and thermal sensors (to gather proprioceptive data).
- Actuators
Series elastic actuators for the arms and DC gearmotors in the chest.
- Degrees of Freedom (DoF)
- 22 (Arms: 6 DoF x 2; Torso: 3 DoF; Neck: 4 DoF; Eyes: 3 DoF)
- Power
External power supply