Curiosity

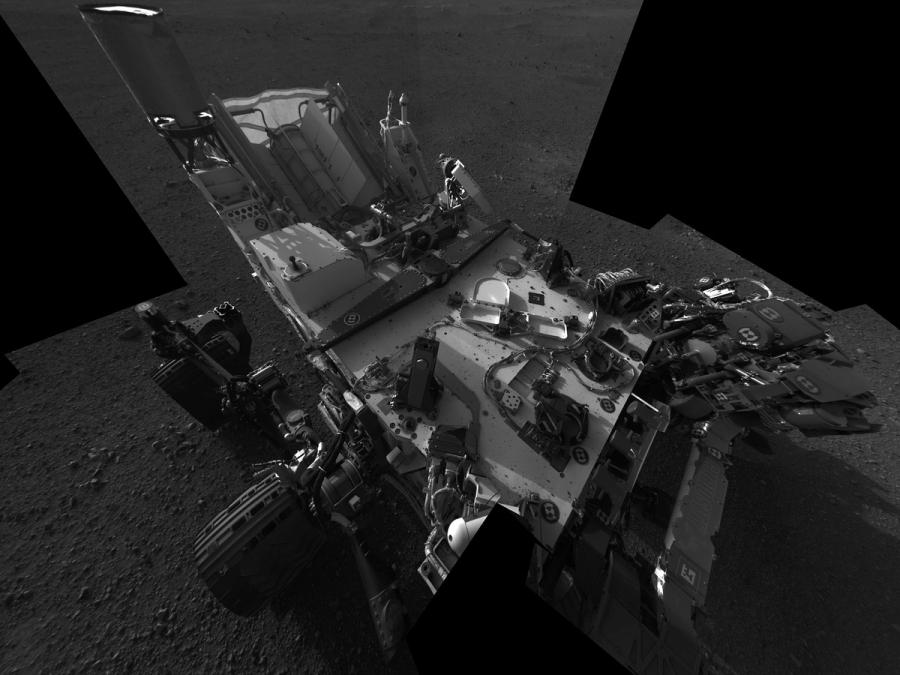
Curiosity is a robotic rover that landed on Mars in August 2012. It's packed with scientific instruments, and its goal is investigating whether Mars has ever had environmental conditions favorable for life.
- Creator
- Year
- 2011
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
Curiosity's software has more than 500,000 lines of code.
History
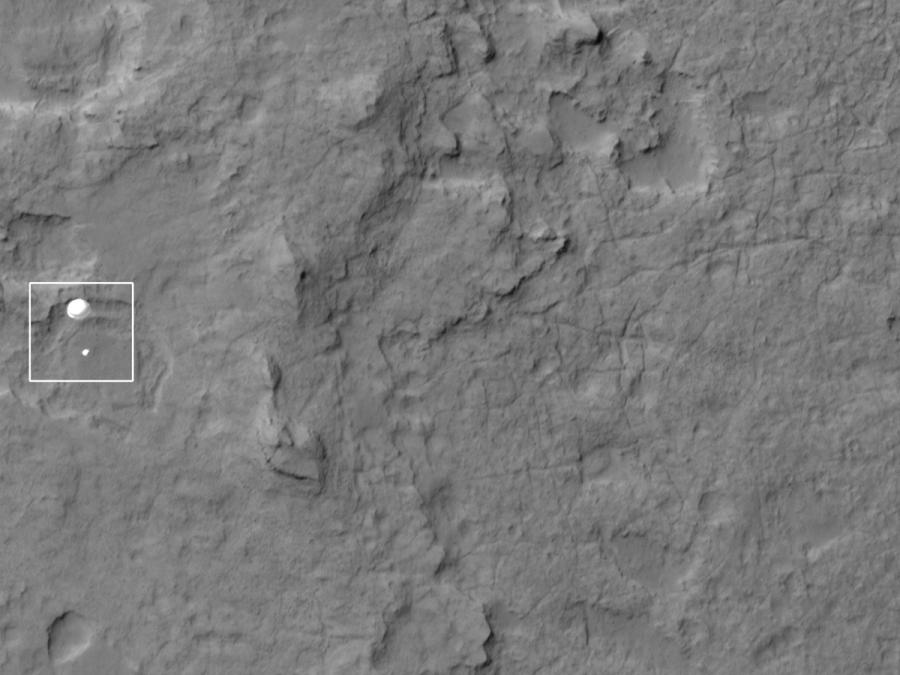
NASA started the Mars Science Laboratory (MSL) mission around 2004, as part of its Mars Exploration Program, a long-term effort for the robotic exploration of Mars. The main goal is studying whether the Gale Crater area of Mars has evidence of past and present habitable environments. The MSL mission is managed by Jet Propulsion Laboratory, in Pasadena, Calif., which previously built the successful Mars rovers Spirit and Opportunity, and before them, Sojourner. JPL completed the Curiosity rover and its transport spacecraft in 2011, and launch took place in November 2011. Curiosity successfully landed in Gale Crater on 6 August 2012. It's now exploring the planet's climate and geology using 10 different scientific instruments designed by an international team. The total cost of the MSL project, including hardware, development, and operations, is about US $2.5 billion.


More Images

Specs
- Overview
Equipped with 10 science instruments. Able to analyze rocks by acquiring samples or zapping them with laser. Capable of driving over rugged terrain.
- Status
Ongoing
- Year
2011
- Website
- Width
- 280 cm
- Height
- 210 cm
- Length
- 300 cm
- Weight
- 899 kg
- Speed
- 0.14 km/h (on flat, hard terrain)
- Sensors
17 cameras (three main science cameras and various navigation cameras), four spectrometers, two radiation detectors, an environmental sensor, and an atmospheric sensor.
- Actuators
10 actuators for the wheels, three for remote sensing mast, two for high-gain antenna, five for arm movements, three for the percussive drill, one for dust removal tool, four for sampling handling and scoop, three for sample inlet covers, two for pumps on the thermal-fluid loop, and approximately 10 more in various instruments, such as for camera focus.
- Degrees of Freedom (DoF)
- 43 (Wheel drive: 1 DoF x 6; Corner-wheel steering: 1 DoF x 4; Remote sensing mast: 3 DoF; High-gain antenna: 2 DoF; Arm: 5 DoF; Percussive drill: 3 DoF; Dust removal tool: 1 DoF; Sample handling and scoop: 4 DoF; Sample inlet covers: 3 DoF; Pumps on the thermal-fluid loop: 2 DoF; Other instruments: 10 DoF)
- Materials
The main materials are aluminum and titanium. The chassis, the core of the rover, has insulated surfaces to house the electronics.
- Compute
Two redundant main computers (one operational and one spare), each powered by a BAE Systems RAD 750, a 200 MHz radiation-hardened processor with PowerPC 750 architecture. Each computer has 2 GB of flash memory, 256 MB of DRAM, and 256 KB of EEPROM.
- Software
On-board flight software (monitors and controls the spacecraft during all phases of the mission, checks for the presence of commands to execute, and performs communication functions).
- Power
Radioisotope thermoelectric generator (converts heat from plutonium-238 into electricity).
- Cost
- $1.8 billion (development of mission's full flight system, including the rover, spacecraft, and all instruments)







