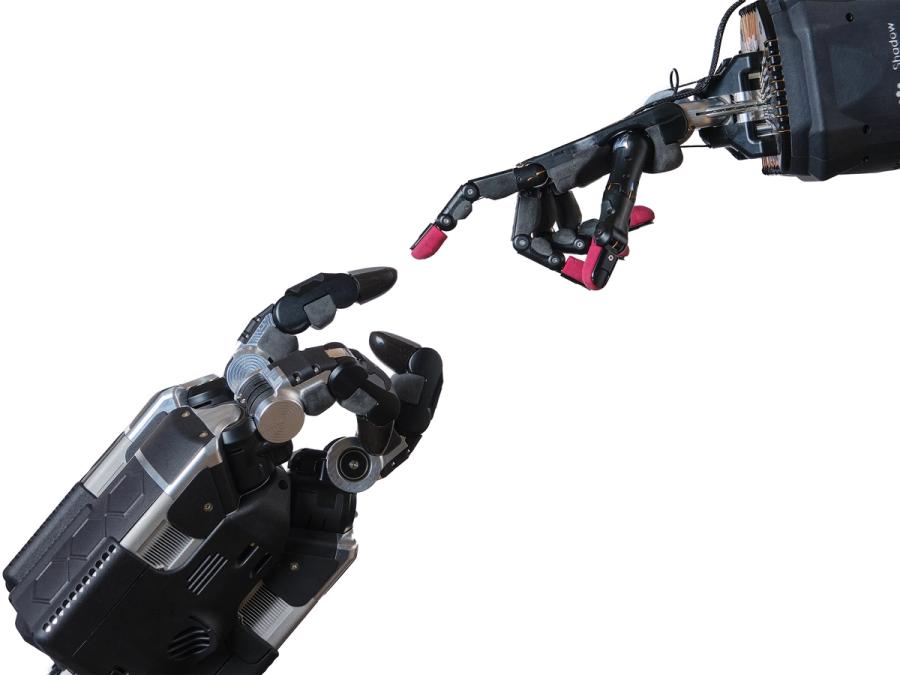
DEX-EE

DEX-EE is an advanced robotic hand designed for deep-learning research into dexterous robot manipulation. Built to be extremely robust and survive long, harsh training sessions, it can maintain fine dexterity and capture copious sensor data.
- Creator
- Year
- 2024
- Country
- United Kingdom 🇬🇧
- Categories
- Features
Did you know?
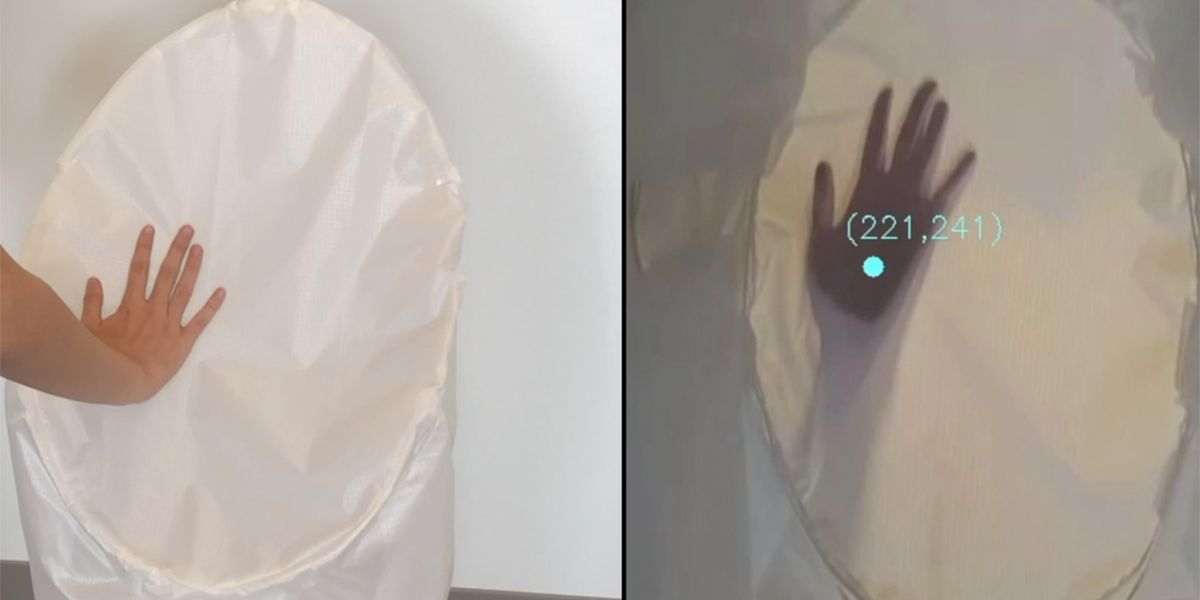
The camera-based tactile sensors were inspired by a colorful toy found in a museum gift shop that changes color at the slightest touch.
History
The DEX-EE robotic hand was created by Shadow Robot, a U.K. robotics firm that specializes in advanced robot dexterity. Collaborating with research labs and industry partners, Shadow designs and manufactures robotic hands and teleoperation systems, and is known for the Shadow Hand, one of the most advanced robot hands in the world.
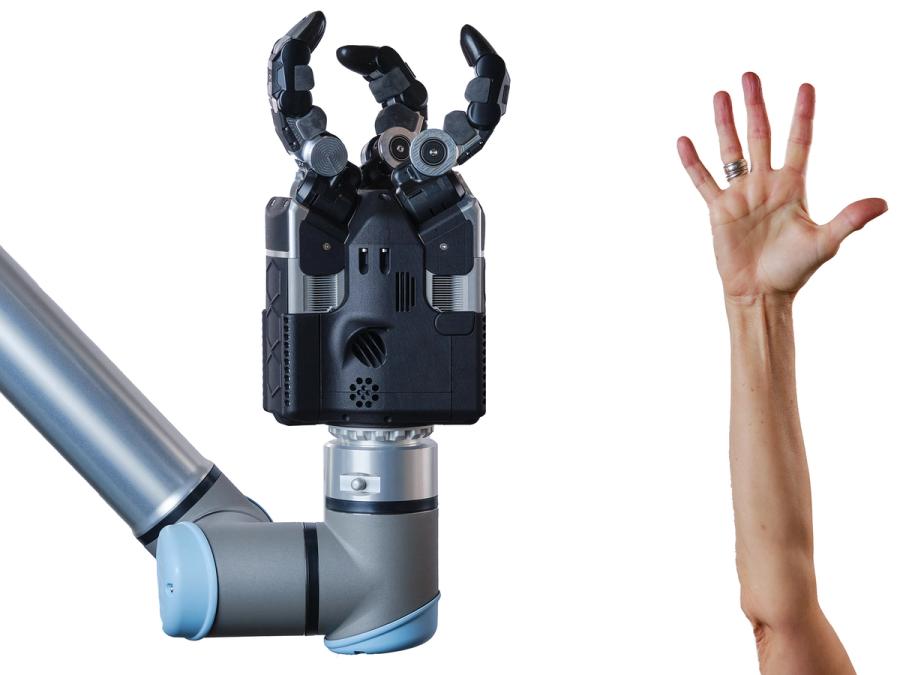
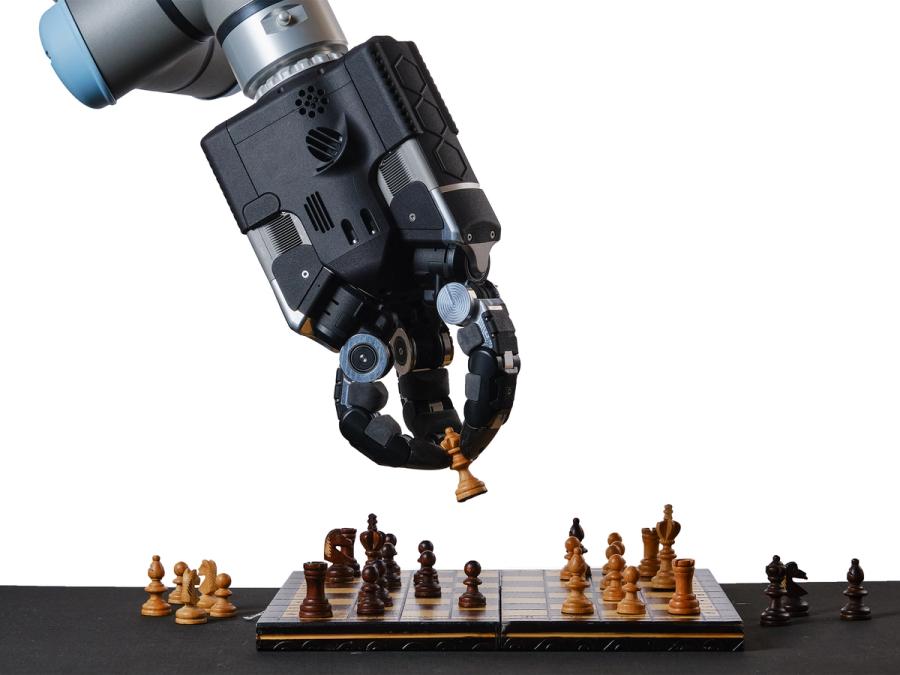
The new DEX-EE robot hand offers significant improvements over previous designs. Created in collaboration with Google DeepMind, DEX-EE aims to address the needs of machine learning projects. It's designed for dexterous manipulation tasks that involved dynamic and precise ranges of motion.
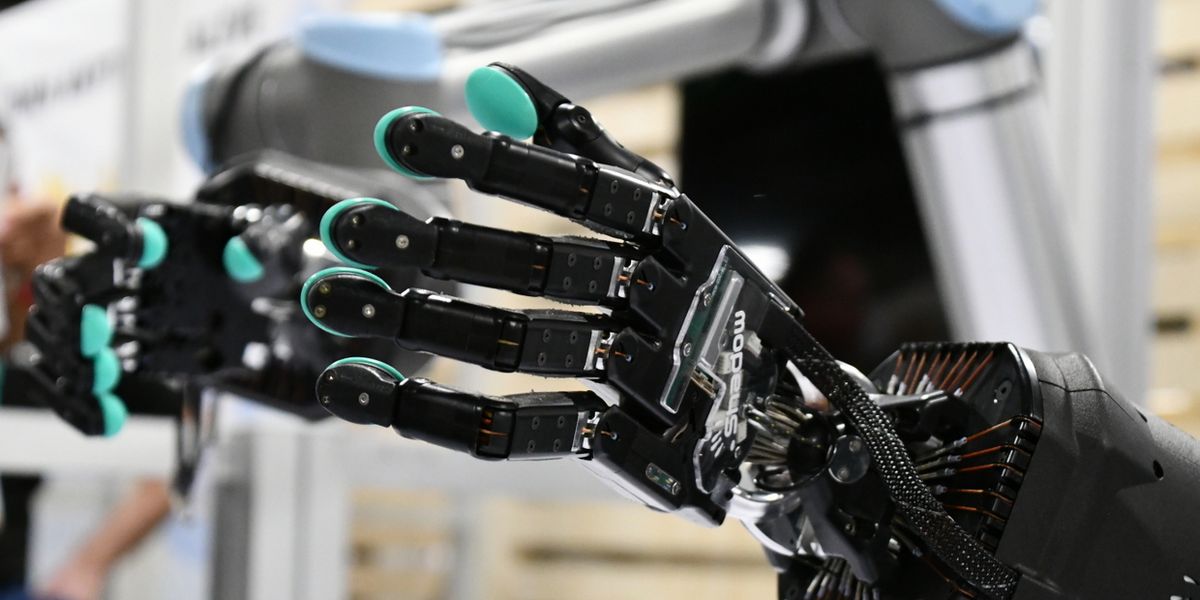
Shadow equipped the hand with high-speed sensor networks to capture force and position data, along with numerous tactile sensing channels per finger. The hand's fingertip sensors have a wide dynamic range, enabling precise movements. It features high bandwidth torque and position control loops, torque and inertial measurement throughout the hand, and stereo camera-based fingertip tactile sensors for detailed 3D interaction.
One of the main goals in developing DEX-EE was making it extremely strong, built to endure rigorous use and reduce downtime. Another goal was ease of deployment and maintenance with minimal training. Integrated with the Robot Operating System (ROS), the DEX-EE is intended for research and development, capable of supporting long-running reinforcement learning experiments that involve dynamic tasks and even impacts and aggressive use.

More Images
Specs
- Overview
Modular construction. Supports alternative finger layouts. Smooth torque control on all joints. Tactile sensing extremely sensitive, high-resolution, and robust.
- Status
Ongoing
- Year
2024
- Website
- Width
- 16 cm
- Height
- 16.5 cm
- Length
- 35 cm
- Weight
- 4.1 kg
- Speed
- 180º/s for each joint
- Sensors
Each finger: 5 tendon force sensors, 5 motor encoders, 4 joint angle sensors, 3 inertial measurement units, 36 total taxels in the middle and proximal tactile sensors, 50 FPS 640x480 pixel stereo video stream from the distal tactile sensor. Plus current, voltage temperature for all motors.
- Actuators
Each finger: 5 Maxon brushed DC motors, configured to drive tendons with accurate force measurement and 10 kHz local force control loop. An N+1 tendon routing configuration drives the four joints (4 degrees of freedom per finger), giving very smooth, backlash free torque control.
- Degrees of Freedom (DoF)
- 12 DoF (4 DoF each finger)
- Materials
3D printed aluminum and nylon. CNC machined aluminum and Delrin plastic.
- Compute
Each motor controlled by a 32-bit microcontroller, the Programmable System on Chip from Cypress Semiconductor. These chips contain reconfigurable digital hardware, similar to an FPGA, allowing implementation of a custom data network running throughout each finger, connecting all joint and tactile sensors. Each motor microcontroller implements a local 10 kHz force control loop, while the 1 kHz position control loop happens on the host PC, connected by EtherCAT.
- Software
DEX-EE's software is designed to run in a container based on Ubuntu. It's built around ROS, with sensor data and controller targets sent via ROS topics. A Python API is also provided for interacting with, and switching between, the available control modes.
- Power
The hand is powered externally from a 150W, 24V power source.
- Cost
- £50000 - £110000