Genghis

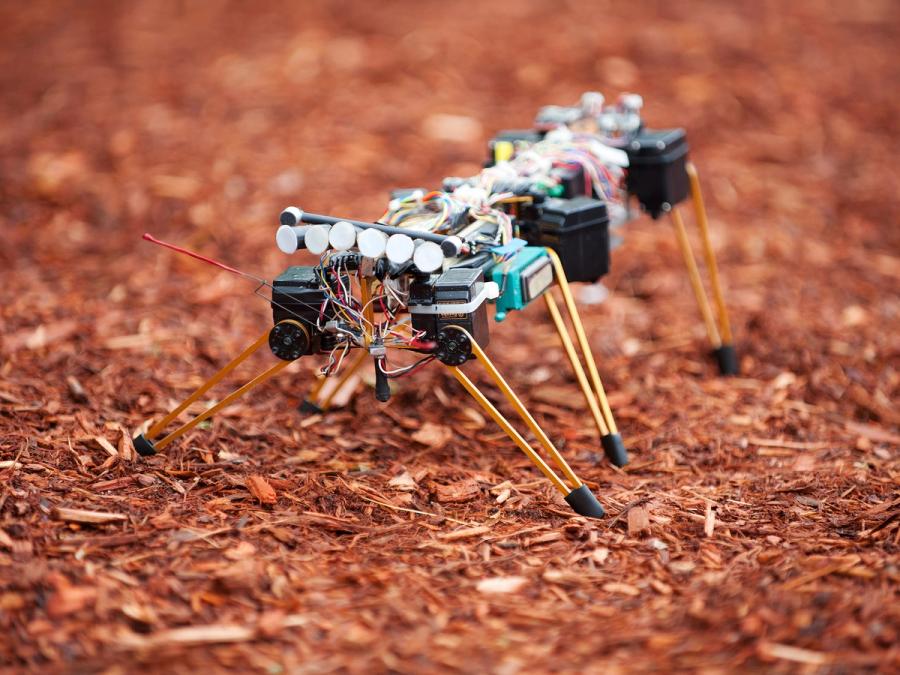
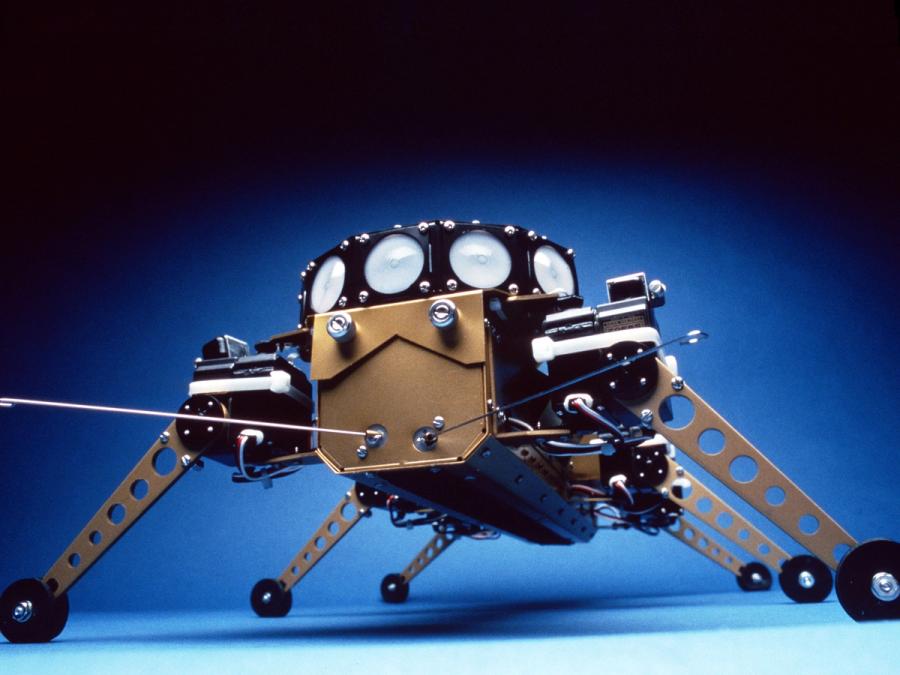
Genghis was a six-legged robot built by Rodney Brooks at MIT in the 1980s. It demonstrated how complex behaviors such as crawling can emerge from a network of simple, decentralized controllers.
- Creator
- Year
- 1989
- Country
- United States 🇺🇸
- Categories
Did you know?
The motors that power Genghis's legs are model airplane servos.
History
Rodney Brooks started the Genghis project in 1988 in response to a NASA Jet Propulsion Laboratory workshop on micro spacecraft. One of the goals was to use the robot as a test bed to explore a new control approach Brooks had conceived, the "subsumption architecture." His idea was that complex behavior such as crawling and climbing over obstacles didn't require a central control system but could emerge instead from simple, distributed controllers. Based on his experience with Genghis and other robots, Brooks proposed that exploration of the solar system should rely on cheap, fast missions using large numbers of mass-produced autonomous robots rather than more complex and costly spacecraft. Brooks and Anita M. Flynn described that idea in a 1989 paper entitled "Fast, Cheap, and Out of Control: A Robot Invasion of the Solar System." Genghis would later reside at the Smithsonian National Air and Space Museum in Washington, D.C.

Specs
- Overview
Equipped with modular subsystems and a subsumption architecture (a control approach linking limited, task-specific perception directly to action).
- Status
Discontinued
- Year
1989
- Website
- Width
- 25 cm
- Length
- 35 cm
- Weight
- 1 kg
- Sensors
12 force sensors, six pyroelectric infrared sensors, two inclinometers, two touch-sensitive whiskers.
- Actuators
12 model airplane position-controllable servomotors
- Degrees of Freedom (DoF)
- 12
- Compute
Four on-board 8-bit microprocessors linked by a 62.5 kilobaud token ring. Total memory of 1 KB of RAM and 10 KB of EPROM.
- Software
Distributed control system with incremental software layers (for controlling different behaviors).
- Power
Three silver-zinc batteries