iCub

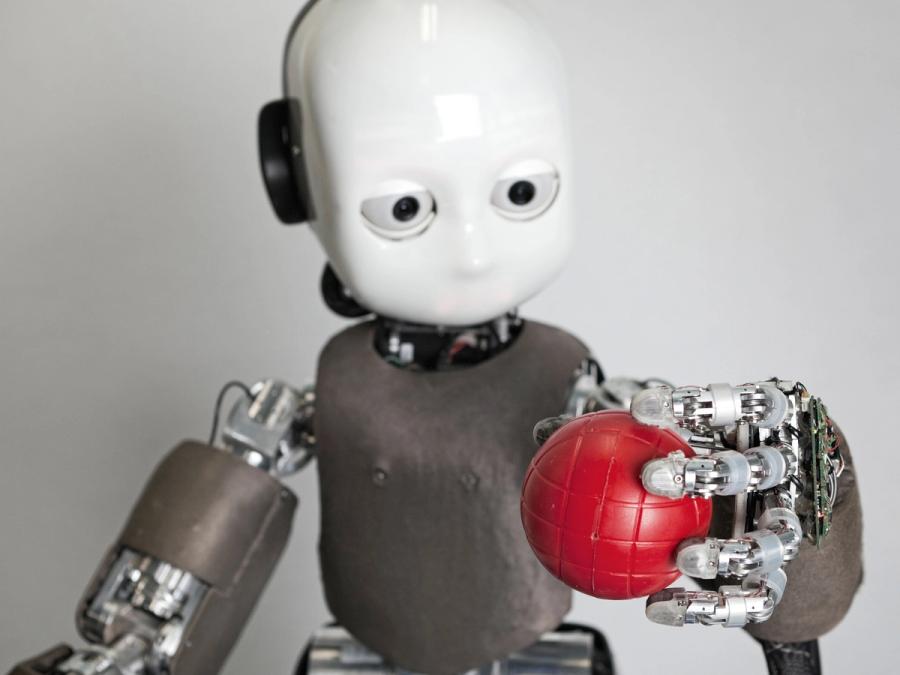
iCub is a child-size humanoid robot capable of crawling, grasping objects, and interacting with people. It's designed as an open source platform for research in robotics, AI, and cognitive science.
- Creators
RoboCub Consortium and Italian Institute of Technology (IIT)
- Year
- 2004
- Country
- Italy 🇮🇹
- Categories
- Features
Did you know?
There are about 20 iCubs in various labs around the world, mainly in Europe (but one is in the United States).


History
The RobotCub Consortium, funded in part by the European Commission's Cognitive Systems and Robotics program, started developing the humanoid iCub in 2004. The first version was released in 2008. New versions followed, upgrading the robot's head mechanics, upper-body skin, and sensing. Researchers used iCub as a platform to study cognition, locomotion, and manipulation. The RobotCub project is currently coordinated by Giulio Sandini and Giorgio Metta at the Italian Institute of Technology (IIT), in Genoa. Other institutions participating in the project include University of Genoa, Scuola Sant'Anna, University of Ferrara, Telerobot, University of Uppsala, University of Sheffield, University of Hertfordshire, IST, EPFL, and University of Zurich. In 2017, Italian researchers published a paper exploring the idea of equipping iCub with small jet engines that would allow it to fly. In 2022, Daniele Pucci and colleagues at IIT introduced iCub3, a bigger, heavier, stronger upgrade that can also be used as a sophisticated immersive telepresence platform.

More Images

Specs
- Overview
Open architecture. Equipped with an array of sensors for seeing, hearing, and touching. Body anatomy similar to that of a human child.
- Status
Ongoing
- Year
2004
- Website
- Height
- 104 cm
- Weight
- 25 kg
- Sensors
Stereo cameras, gyroscopes, accelerometers, microphones, encoders, force-torque sensors, and capacitive tactile sensors (fingertips and upper body skin).
- Actuators
54 motors (150-W brushless motors for shoulders and other large joints and DC motors for hands and small joints).
- Degrees of Freedom (DoF)
- 54 (54 powered, 76 total)
- Materials
Mostly Ergal aluminum alloy, steel, and plastic.
- Compute
On-board systems include an Intel Core 2 Duo (main computer) and 20 microcontroller boards for motors, 16 boards for sensors, and a Pentium computer for data acquisition and synchronization. Off-board systems include a cluster with 30 to 40 cores and GPU processing.
- Software
Debian Linux on-board OS. Off-board systems include Windows, Linux, and Mac OS, and YARP (Yet Another Robot Platform) as software middleware for external cluster.
- Power
Tethered, 12-V to 48-V power supply
- Cost
- $300,000