Octavia
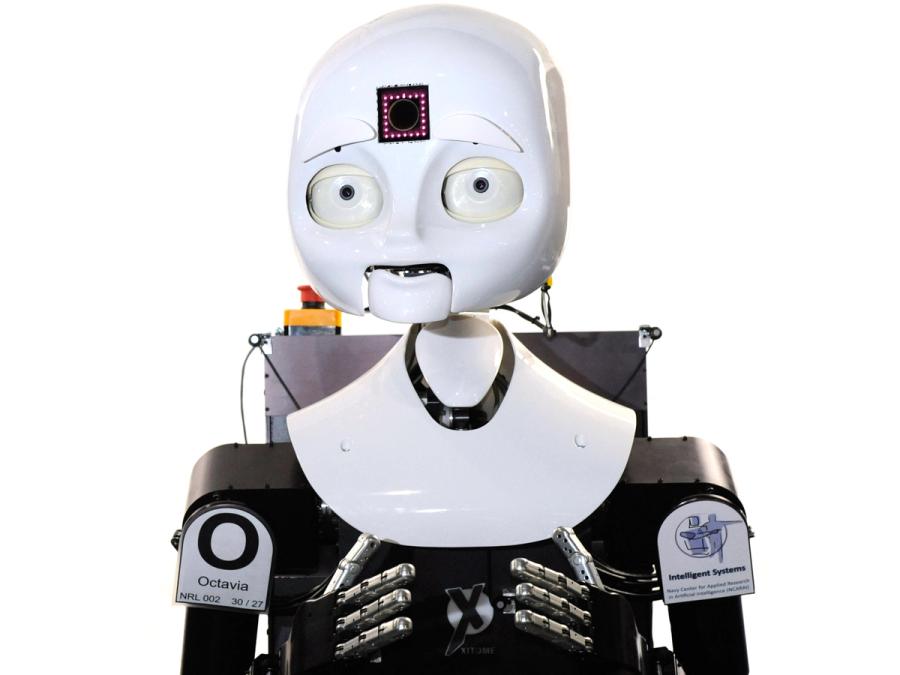
Octavia is a social humanoid robot with an expressive face and dexterous hands. It's designed to understand how humans perceive, think, and act, using her knowledge to interact naturally with people.
- Creator
- Year
- 2009
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
Octavia has two brothers, Lucas and Issac, and several cousins, including Nexi (at MIT) and Cindy (at Tufts University).

More Images



Specs
- Overview
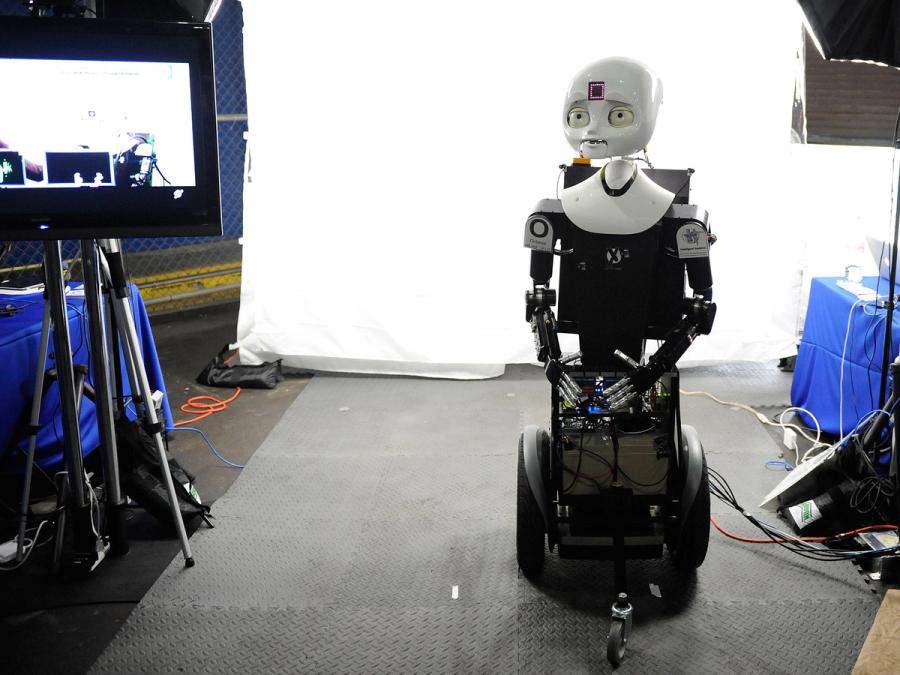
Two-wheel self-balancing base for mobility. Able to use its hands for dexterous object manipulation. Expressive face for social interaction.
- Status
Unknown
- Year
2009
- Website
- Width
- 63.5 cm
- Height
- 175 cm
- Length
- 56 cm
- Weight
- 168 kg
- Speed
- 16 km/h
- Sensors
Two video cameras in the eyes, 3D active infrared/visible camera in the forehead, LIDAR in the mobile base. Optional: 3D passive infrared camera, microphone array, fingertip pressure sensors.
- Actuators
DC motors
- Degrees of Freedom (DoF)
- 45 (Head: 20 DoF; Hand: 7 DoF x 2; Arm: 4 DoF x 2; Torso: 1 DoF; Wheels: 2 DoF)
- Materials
Machined aluminum, plastic.
- Compute
PC/104-based computer for body and base control; Intel PC for sensing.
- Software
Linux and Windows OS, custom control and sensing software, ACT-R/E cognitive architecture.
- Power
36-V lead-acid battery plus two lithium-ion batteries for drive system, 2 hours of operation.