Pneuborn
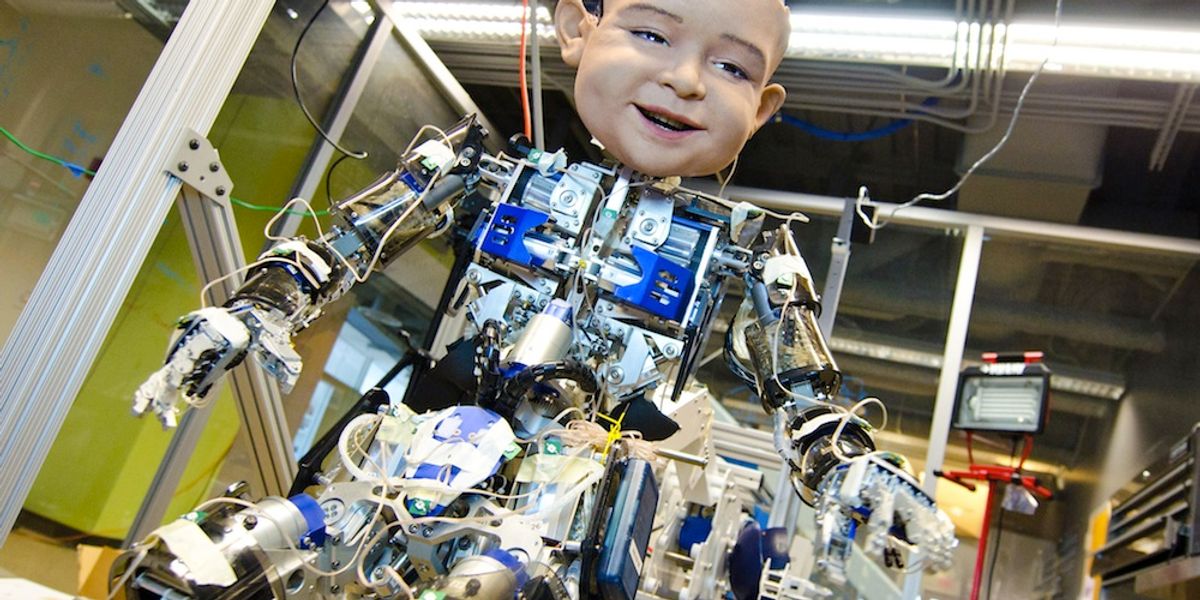
Pneuborn is a robotic infant simulator that focuses on the development of musculoskeletal systems. It can teach itself to crawl, sit, and stand using pattern generators and learning algorithms.
- Creator
- Year
- 2009
- Country
- Japan 🇯🇵
- Categories
- Features
Did you know?
The name "Pneuborn" comes from the artificial muscles that the robot uses, which are air-powered.

History
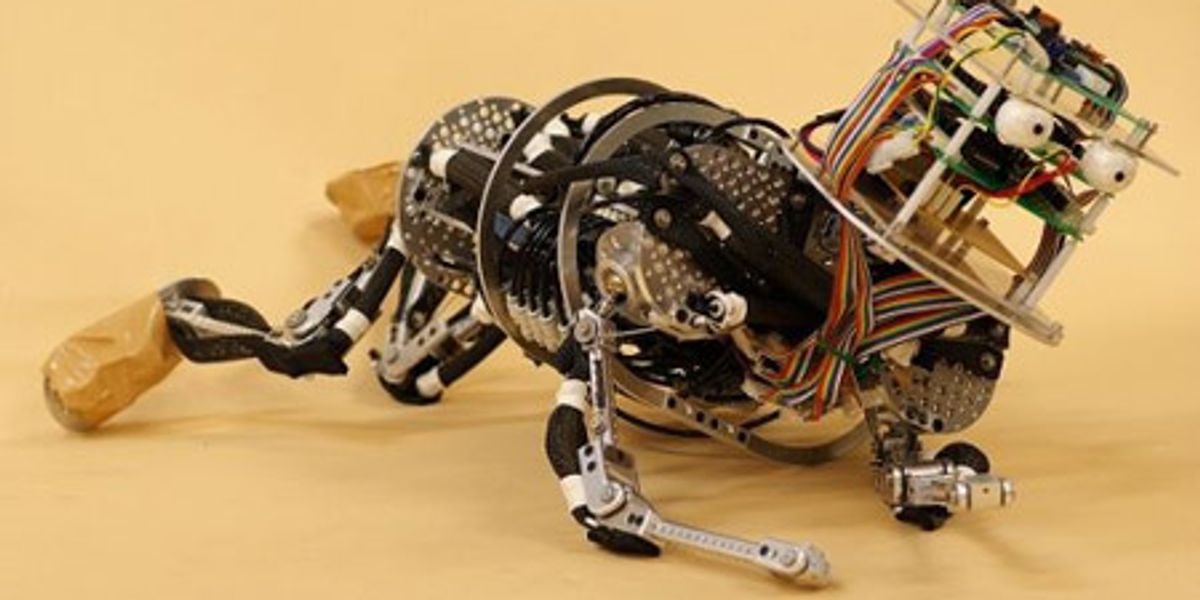
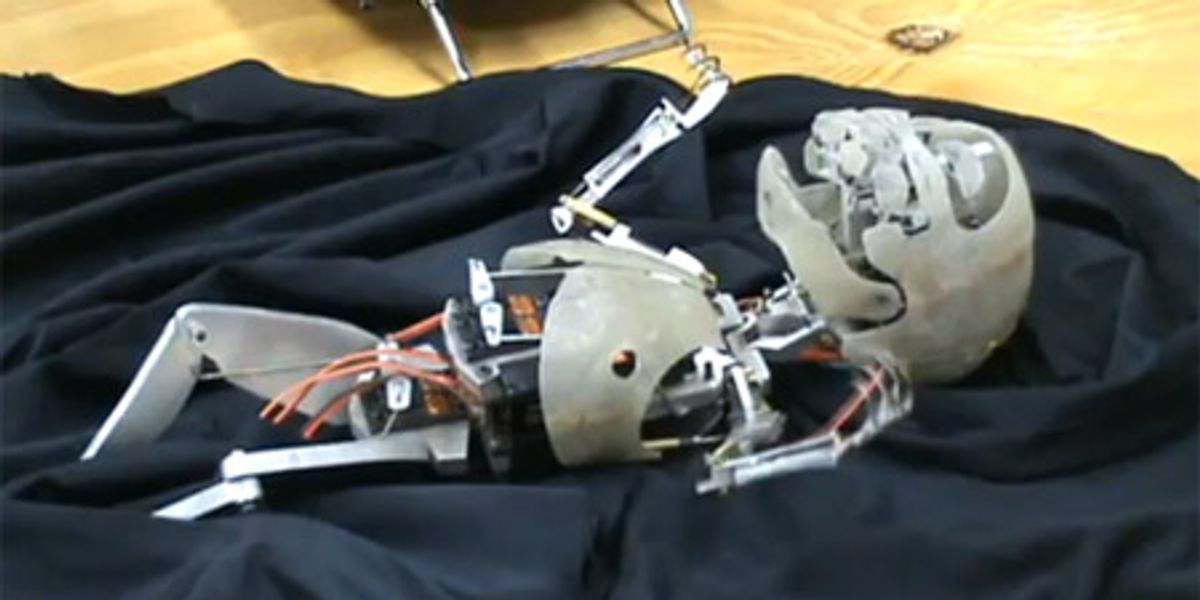
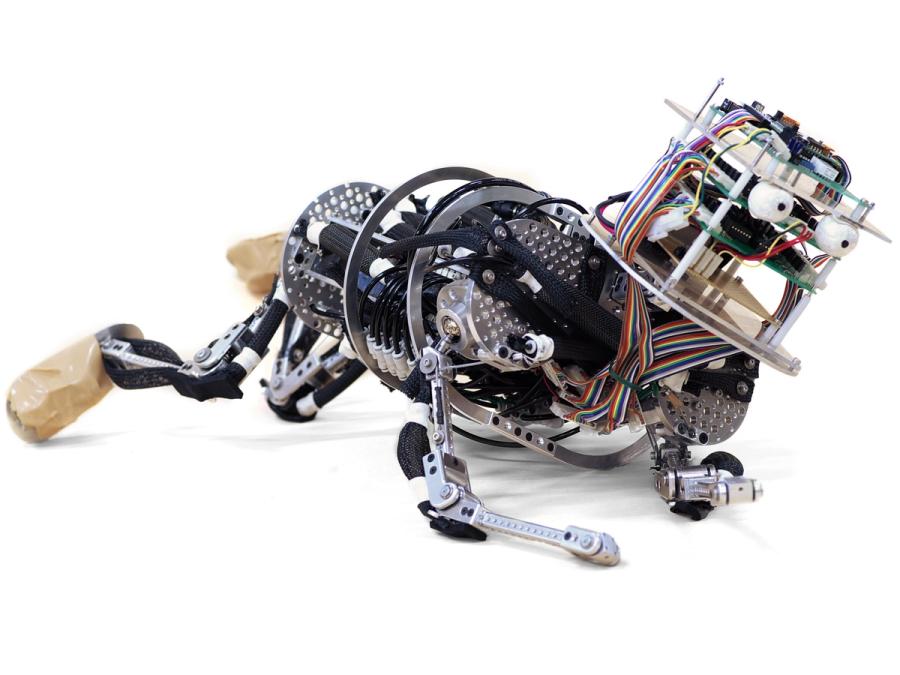
Pneuborn was designed by Koh Hosoda from Osaka University, in Japan. In 2011, Hosoda and his colleagues unveiled two pneumatically powered robot babies: Pneuborn-7II and Pneuborn-13. Pneuborn-7II is a musculoskeletal infant robot designed to explore the association between cognitive development and movement in infants. It has 19 pneumatic muscles plus a jointed, actuated spine. Pneuborn-13 is an infant-size musculoskeletal robot driven by pneumatic actuators that's learning to crawl, stand, and walk.
Specs
- Overview
Design of body structures based on a real human infant. Equipped with robust pneumatic musculoskeletal system.
- Status
Inactive
- Year
2009
- Website
- Height
- 80 cm
- Weight
- 6.4 kg
- Sensors
External motion capture system
- Actuators
McKibben pneumatic artificial muscles
- Degrees of Freedom (DoF)
- 26
- Compute
Renesas H8-3069 microcontroller
- Software
Custom software in C/C++
- Power
Lithium-polymer battery and external air compressor.