Stretch

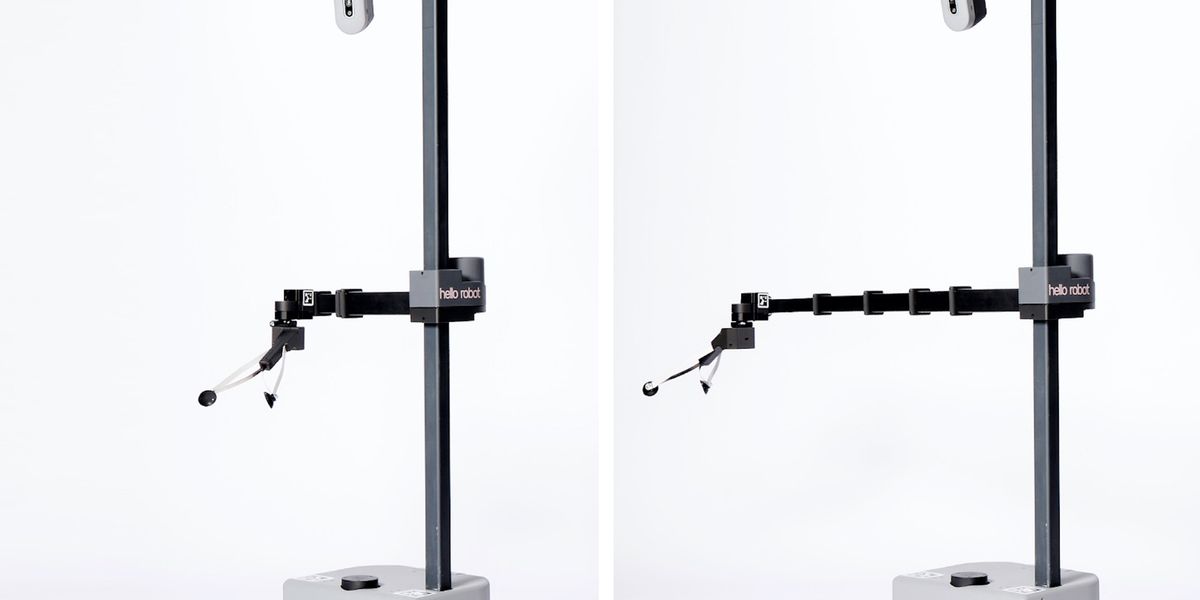
Stretch is a compact, lightweight, and low-cost mobile robot equipped with an innovative telescoping arm. It's designed for researchers developing robot applications to help people in homes and workplaces.
- Creator
- Year
- 2020
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
Hello Robot cofounders Aaron Edsinger and Charlie Kemp met at MIT, where they were students of famed roboticist Rodney Brooks.

History
Hello Robot introduced Stretch RE1, a compact, low-cost mobile manipulator designed for researchers, in July 2020. With offices in the San Francisco Bay Area and in Atlanta, Ga., Hello Robot was founded by ex-Googler Aaron Edsinger and Georgia Tech robotics professor Charlie Kemp. Previously, Edsinger was a cofounder of Meka Robotics and Redwood Robotics, which were acquired by Google in 2013, along with six other robotics companies, including Boston Dynamics. Edsinger stayed at Google as one of the directors of its robotics program until 2017, when he left to cofound Hello Robot with Kemp. Kemp heads Georgia Tech's Healthcare Robotics Lab, where he conducts research on mobile manipulators to assist older adults and people with disabilities. Hello Robot launched Stretch as a research platform but the company says it hopes to see the robot deployed in homes and workplaces so that it is helpful to people in society.


Specs
- Overview
Specs for RE1 version. Lightweight design featuring a low-mass, contact-sensitive body. Safe to interact with people. Small footprint allows it to work in tight and cluttered environments. Supports advanced teleoperation and development of autonomous behaviors. Open source code. Extensible hardware.
- Status
Ongoing
- Year
2020
- Website
- Width
- 34 cm
- Height
- 141 cm
- Length
- 33 cm
- Weight
- 23 kg
- Speed
- 2.16 km/h (max)
- Sensors
Head: Intel RealSense D435i with IMU. Base: Slamtex RPLidar A1 laser range finder; 9-DOF inertial measurement unit (IMU). Arm: Force sensing via motor current. Wrist: 3-DOF accelerometer.
- Actuators
Arm: Single motor. Base: Differential two wheel. Wrist: Support for Dynamixel X-Series
- Degrees of Freedom (DoF)
- 6 (Arm: 4 DoF [Lift: 1 DoF; Telescoping links: 1 DoF; Wrist: 1 DoF; Gripper: 1 DoF]; Base: 2 DoF)
- Materials
Arm with custom carbon fiber links. Head, shoulder, and mobile base have polyurethane covers.
- Compute
Intel i5-8259U, 16 GB RAM, 480 GB SSD, 4-channel ReSpeaker MicArray, 8-W stereo audio out with volume adjust.
- Software
Ubuntu 18.04 LTS, ROS Melodic. Code is open source and available on GitHub. Custom code written almost entirely in Python and firmware based on open source Arduino sketches.
- Power
18-Ah 12-V DC sealed lead acid battery
- Cost
- $17,950