GITAI G1

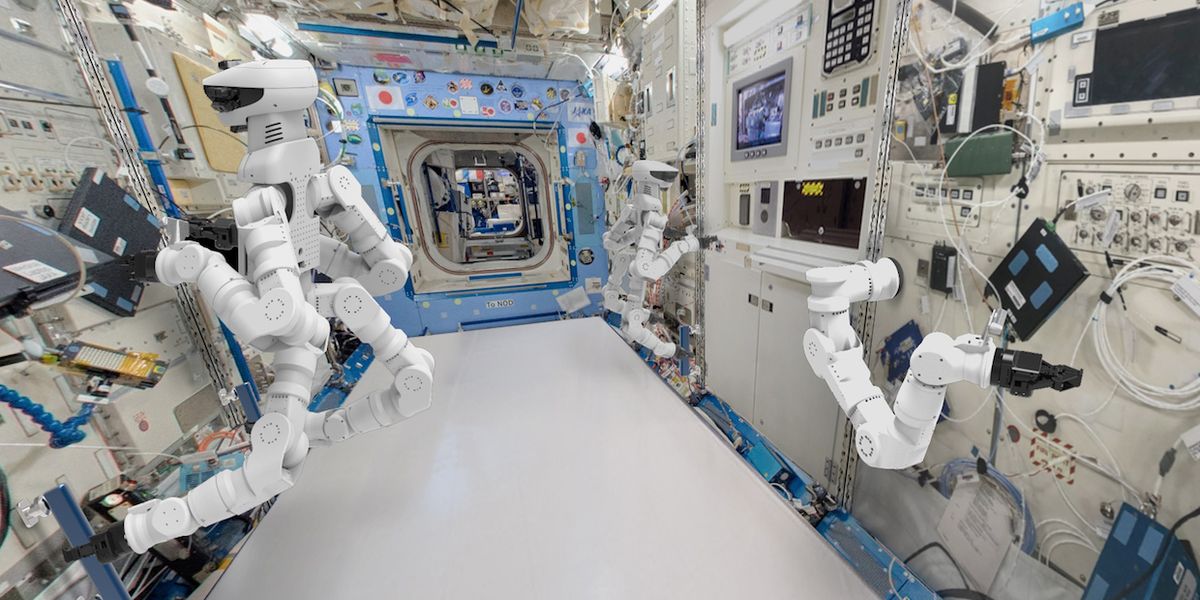
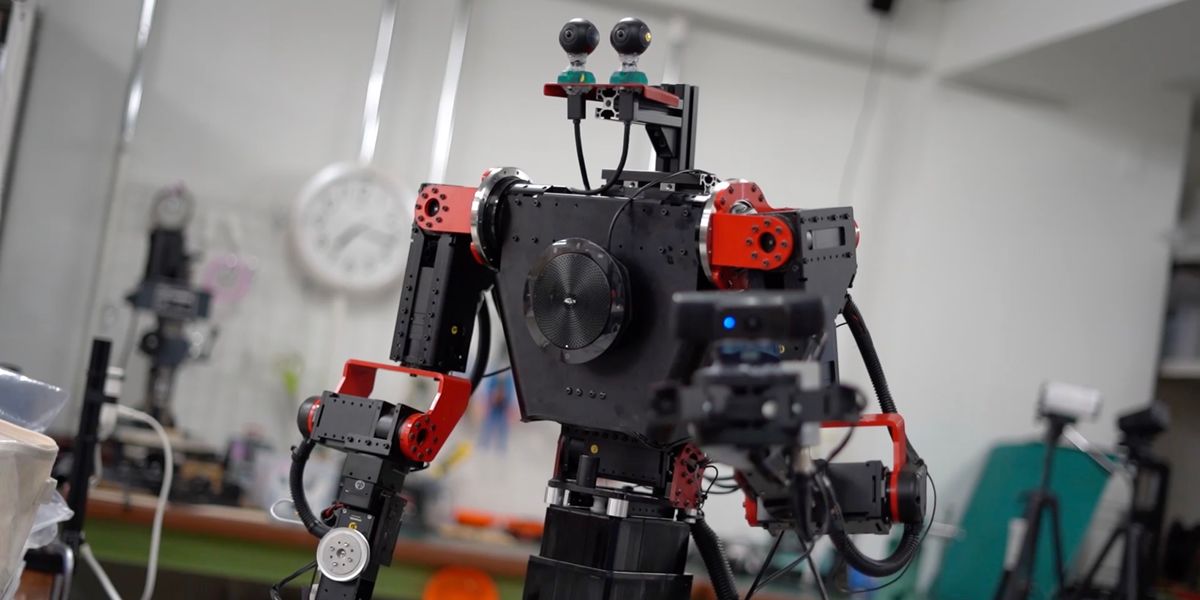
GITAI G1 is a general-purpose humanoid robot for space applications. It combines AI and teleoperation to perform tasks like manipulation of tools, control boards, and scientific equipment. It's designed to operate inside and outside space stations and future lunar bases.
Did you know?
GITAI G1 can manipulate soft objects like fabric, a task that's considered extremely hard for robots to do.

History
GITAI was founded in 2016 with the goal of disrupting the space industry. Founder and CEO Sho Nakanose recruited Yuto Nakanishi, a former researcher at the University of Tokyo's JSK Lab, where he built Kojiro, Kenshiro, and other humanoids, and was the founder and CEO of SCHAFT, a robotics startup sold to Google in 2013. Joining chief robotics officer Nakanishi were Toyotaka Kozuki (CTO) and Ryohei Ueda (VP of software), who had also worked at JSK Lab. Their plan is developing more capable and less expensive robotics systems to answer the growing demand for construction and maintenance activities in space. Investors in the company include Skyland Ventures, ANRI, 500 Startups-Japan, Spiral Ventures, DBJ Capital, and J-Power. In July 2021, GITAI won a procurement contract from Japan's Ministry of Economy, Trade, and Industry (METI) to develop "extra-vehicular general-purpose robotic arms and hand technology that can autonomously perform multiple complex tasks on-orbit and on the lunar surface." In October 2021, GITAI completed a successful technology demonstration inside the International Space Station (ISS). In April 2022, GITAI conducted a successful demonstration of In-Space Servicing, Assembly, and Manufacturing (ISAM) activities in a simulated space environment. In December 2022, GITAI announced the start of U.S. operations with the opening of an office in Torrance, Calif.

Specs
- Overview
Ultralow latency streaming of high resolution and wide FOV video. High power actuation system for high speed and high torque motions and elastic response to external force. Dual-arm manipulation. Real-time logging and diagnostics framework for high-reliability. Redundant joint axis configuration for broad reachability. Omnidirectional perception capability. User interface providing intuitive control via GITAI manipulation system H1.
- Status
Ongoing
- Year
2020
- Website
- Width
- 40 cm
- Height
- 200 cm
- Length
- 40 cm
- Weight
- 120 kg
- Speed
- 4 km/h
- Sensors
High resolution cameras and other vision and actuator sensors
- Actuators
GITAI custom actuators; 245 Nm / 47.5 rpm
- Degrees of Freedom (DoF)
- 21 DoF (Arm: 8 DoF x 2; Hand: 1 DoF x 2; Torso:3 DoF)
- Materials
Iron, aluminum, and 3D-printed parts
- Compute
NVIDIA Jetson compute module
- Software
- Power
Battery or external power, depending on application
- Cost
- Depends on customer requirements