HRP-2

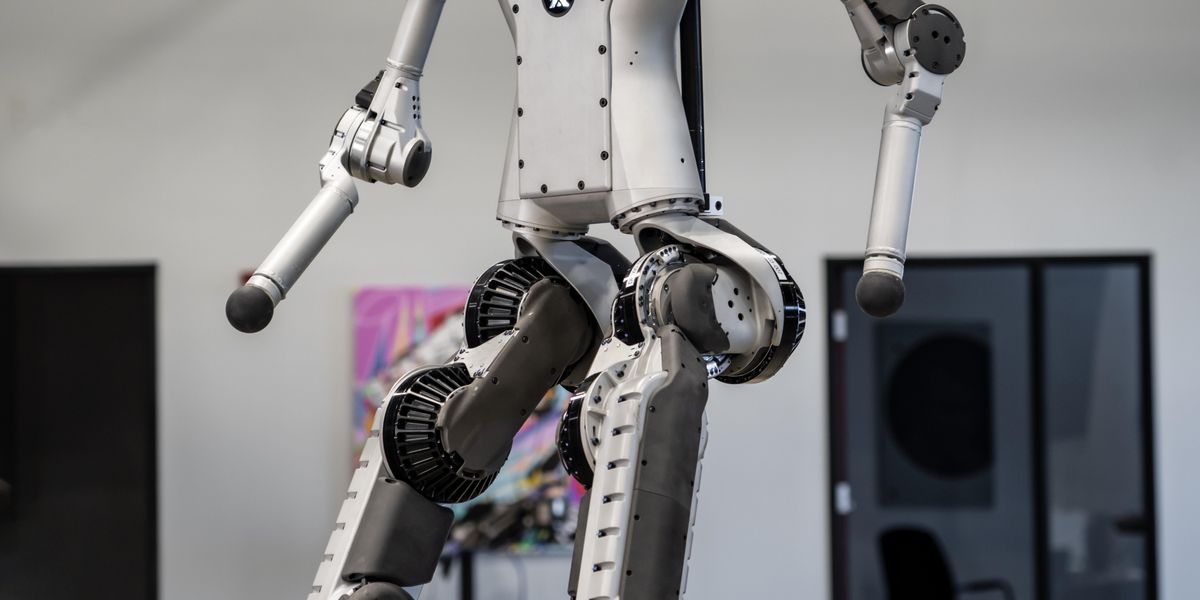
HRP-2 is a popular research humanoid with a deliberately futuristic look. It can cooperate with humans in lifting heavy objects, walk on uneven surfaces, and even get up by itself if it falls over.
Did you know?
HRP-2's exterior was created by Yutaka Izubuchi, a designer famous for his anime robots.


History
HRP-2 (also known as "Promet") is the second generation in the HRP series of robots, the result of a lasting collaboration between Kawada Industries, led by Tadahiro Kawada, and Japan's National Institute of Advanced Industrial Science and Technology (AIST), headed by Tamotsu Nomakuchi. HRP-2 was announced in 2002 and was followed by HRP-3 in 2006 and HRP-4 in 2010.


More Images


Specs
- Overview
Open architecture and powerful simulation tools. Equipped with a "cantilevered crotch joint" for walking in confined spaces.
- Status
Ongoing
- Year
2002
- Website
- Width
- 65.4 cm
- Height
- 154 cm
- Length
- 33.7 cm
- Weight
- 58 kg
- Speed
- 2 km/h
- Sensors
Three cameras, three-axis gyro, three-axis accelerometer, 30 motor encoders, six-axis force sensors in the arms and legs.
- Actuators
30 DC motors
- Degrees of Freedom (DoF)
- 30 (Head: 2 DoF; Arm: 6 DoF x 2; Hand: 1 DoF x 2; Waist: 2 DoF; Leg: 6 DoF x 2)
- Compute
Two CPU boards
- Software
Linux OS
- Power
48-V 14.8-Ah nickel-metal hydride battery