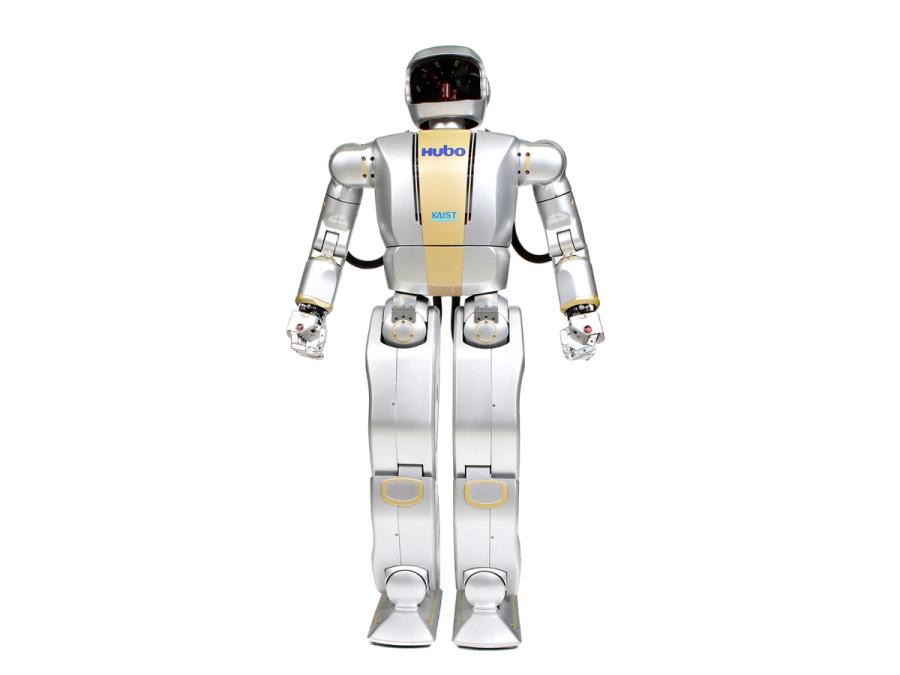
Hubo 2

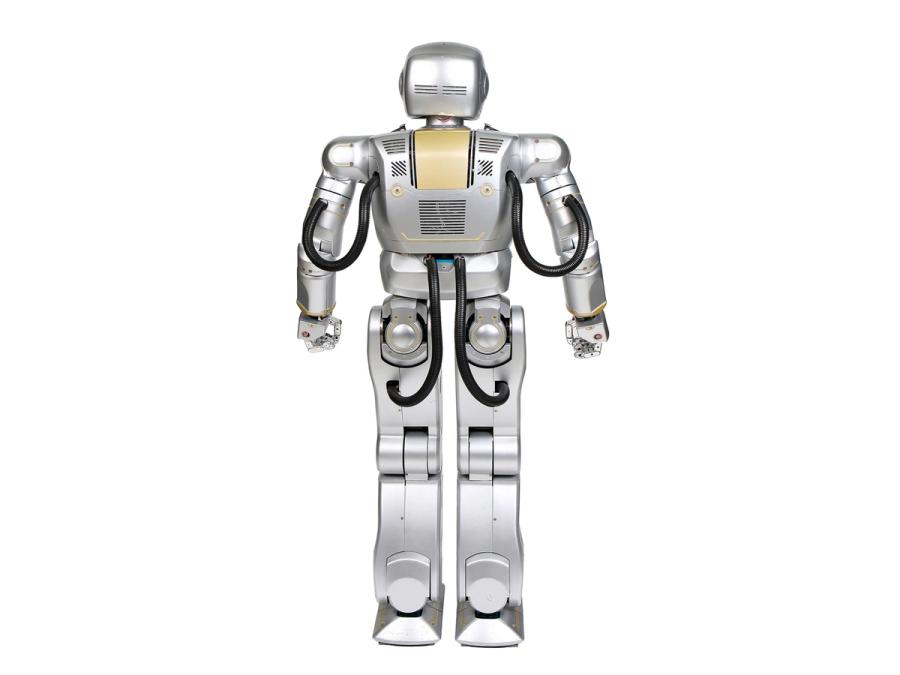
Hubo 2 is a full-size humanoid that can walk, run, dance, and grasp objects. It uses a straight-leg walking gait that's an improvement over most bipedal robots, which keep their knees bent to balance.
- Creator
- Year
- 2009
- Country
- South Korea 🇰🇷
- Categories
- Features
Did you know?
Hubo 2 has 40 motors and can walk around for two hours straight without a break.

History
Hubo is a humanoid robot series designed by Prof. Jun-Ho Oh at the Korea Advanced Institute of Science and Technology (KAIST) in Seoul, South Korea. Prof. Oh built the first Hubo in 2004. It was one of the first advanced full-body humanoid robots developed outside Japan. In 2010 he unveiled Hubo 2, a major upgrade on the original version. Prof. Oh is also known for building two other Hubo robots: Albert Hubo, which had a Hubo body and an Albert Einstein animatronic head developed by Hanson Robotics, and DRC-Hubo, a "transformer" robot that won the DARPA Robotics Challenge.

Specs
- Overview
Modular, lightweight design. High performance actuation system optimized for dynamic tasks.
- Status
Inactive
- Year
2009
- Website
- Height
- 125 cm
- Weight
- 45 kg
- Speed
- 1.5 km/h (walking); 3.6 km/h (running)
- Sensors
Camera, three-axis force-torque sensor, two-axis inertial sensor, two-axis tilt sensor.
- Actuators
44 brushless DC motors (19 200-W 48-V motors, six 100-W 48-V motors, nine 11-W 48-V motors, and 10 0.75-W 12-V motors).
- Degrees of Freedom (DoF)
- 40 (Neck: 3 DoF; Arm: 7 DoF x 2; Hand: 5 DoF x 2; Torso: 1 DoF; Leg: 6 DoF x 2)
- Materials
Hard plastic exterior, aluminum skeleton.
- Compute
Two PC/104 embedded computers with solid state drives
- Software
Windows XP OS with RTX (Real-Time Extension) for Windows.
- Power
48-V lithium-polymer battery
- Cost
- $400,000







