Surena 4

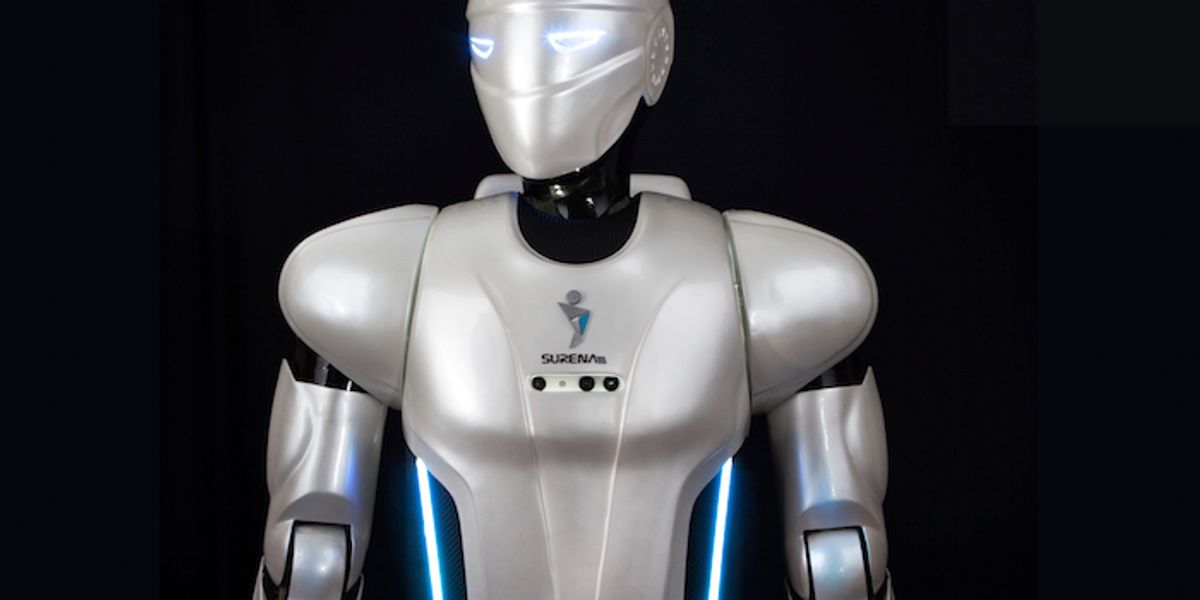
Surena 4 is a humanoid robot platform designed to study bipedal locomotion, manipulation, and AI. The latest generation in a series of humanoid models, this version can walk on uneven terrain and grasp objects with force control, including a pen used to write its name. It's also used to provide entertainment at special events and to attract students to careers in engineering.
Did you know?
Surena 4 is the latest generation of the Surena series of humanoid robots developed in Iran.

History
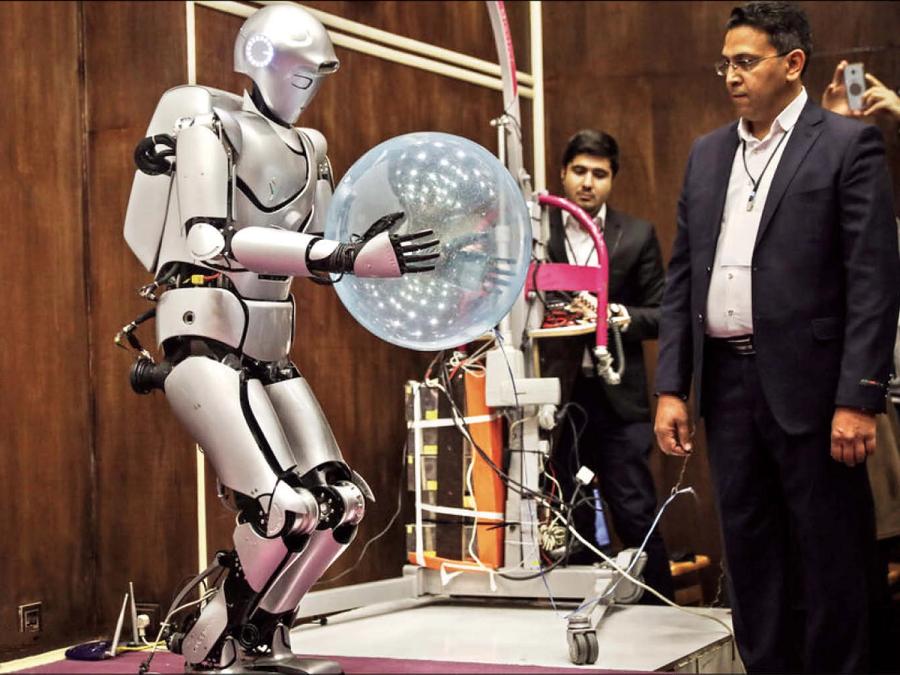
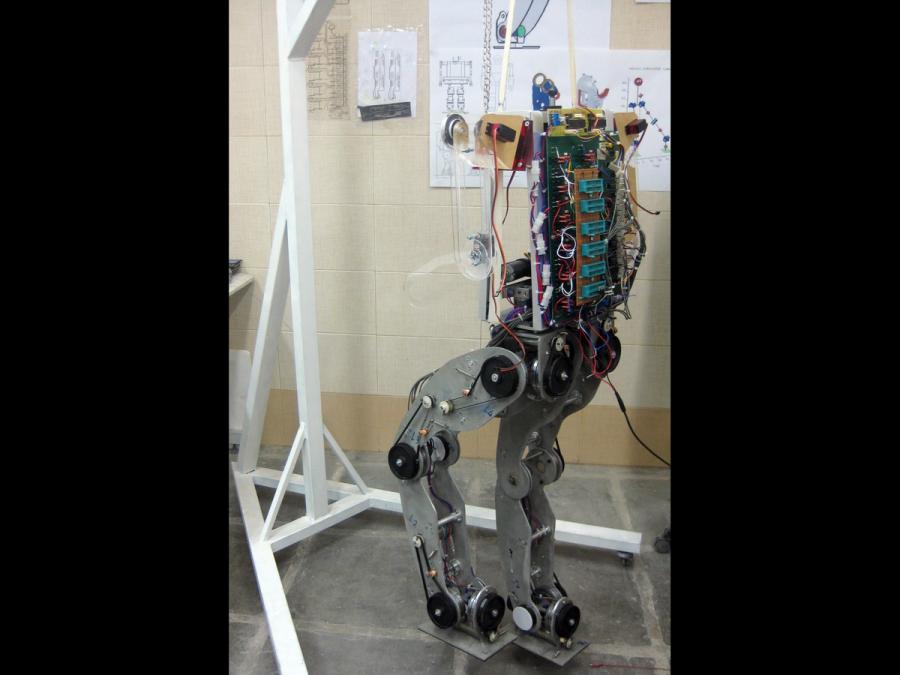
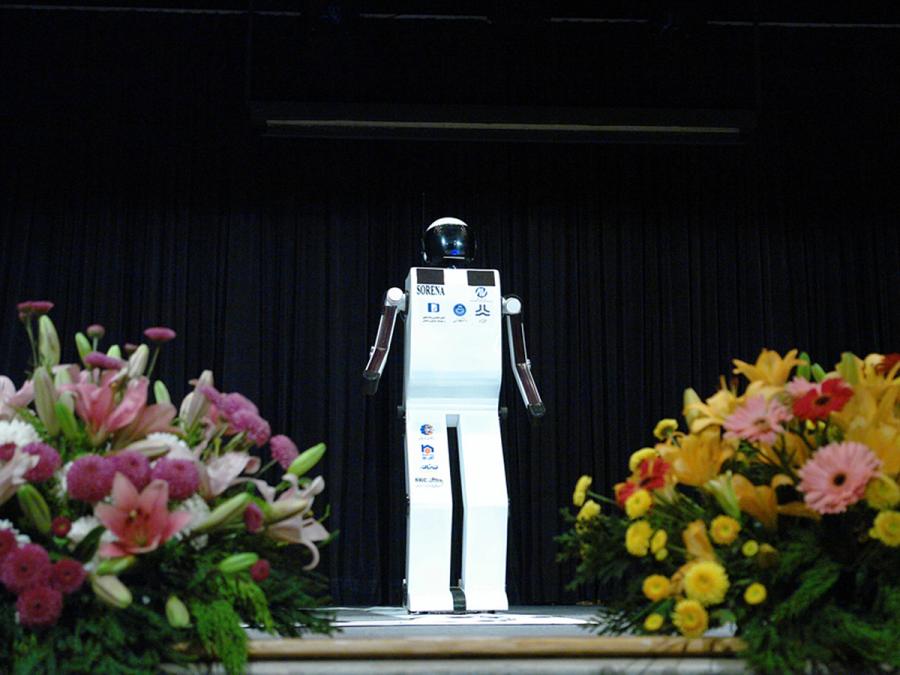
In 2008, researchers at the University of Tehran introduced a rudimentary humanoid robot called Surena, with only 8 degrees of freedom (DoF). An improved model capable of walking, Surena 2, with 22 DoF, was announced not long after, followed by the more capable Surena 3, with 31 DoF, in 2015. In late 2019, the Iranian roboticists unveiled Surena 4. With 43 DoF, the new robot is a major improvement over previous designs. Surena 4 is lighter, more compact, and more agile. It's capable of mimicking a person's full-body pose, grasping a water bottle, and writing its name on a whiteboard. A team of about 50 engineers and researchers built Surena 4 at the University of Tehran's Center for Advanced Systems and Technologies (CAST). Led by Aghil Yousefi-Koma, a professor of mechanical engineering, the group worked for nearly four years to develop the new robot. Professor Yousefi-Koma has emphasized that he views Surena as a "symbol of technology advancement in the direction of peace and humanity," hoping it will help inspire people about the possibilities of robotics.


More Images


Specs
- Overview
Capable of walking on uneven terrain, push recovery, manipulating of objects, and force-controlled gripping. Has face and object detection and follow, action imitation with whole-body motion generation, and speech recognition and synthesis.
- Status
Ongoing
- Year
2019
- Website
- Width
- 55 cm
- Height
- 170 cm
- Length
- 35 cm
- Weight
- 68 kg
- Speed
- 0.7 km/h
- Sensors
Cameras, gyroscope, accelerometers, inertial measurement unit (IMU), 6-axis force-torque sensors, motor absolute and incremental encoders, current sensors, foot contact sensors, microphone.
- Actuators
21 custom actuators (harmonic drive, frameless flat high torque motors, incremental and absolute encoders), 10 mini servo actuators, 12 micro servo actuators.
- Degrees of Freedom (DoF)
- 43 DoF (Head: 3 DoF; Arm: 7 DoF x 2; Hand: 6 DoF x 2; Waist: 2 DoF; Lower body: 6 DoF x 2)
- Materials
Core structure: AZ91 magnesium alloy, aluminum, carbon fiber. Exterior: 3D printed shell.
- Compute
Intel Core i7 2.8 GHz CPU. GTX 1060 6 GB GDDR5 GPU. FPGA and microcontrollers.
- Software
Ubuntu Linux OS, C++ and Python control application, ROS, Gazebo, and Choreonoid simulation software. Github repository.
- Power
Two 10,000 mAh 22.2 V lithium-polymer battery packs, 30 minutes of operation.